正如我们在上一讲中所说,2017a的Matlab带来了一系列“车辆动力学模型”,这直接导致了业界HIL中的“一维纵向动力学模型”从高端产品沦为街头地摊,生意难做。
宇宙中最强大的工程 IDE 并不止于此。 它在2018版本中进一步发布了完全自由的车辆模型,并且还带有自己的场景。
独自挑战“Prescan+Carsim”的黄金组合,今天我们就用它来谈谈几种自动驾驶测试解决方案。
第一步是构建一个简单的游戏机并玩它
MATLAB/Simulink 提供了可用于驱动程序在环的基本演示模型。 网址:
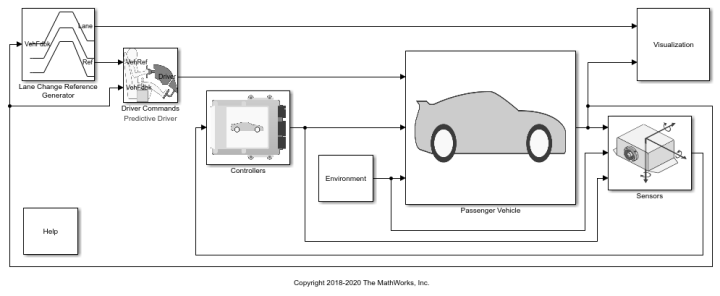
该模型简单明了,如下图:
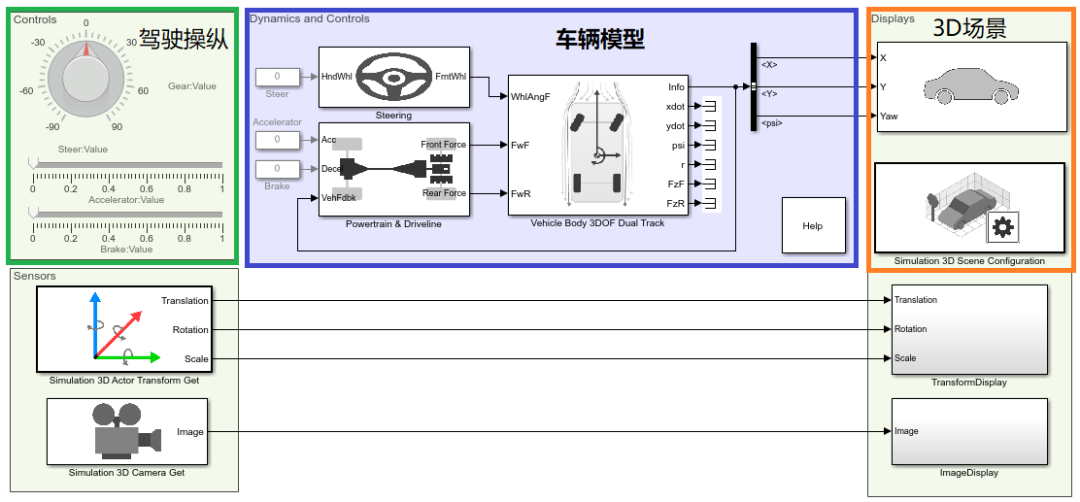
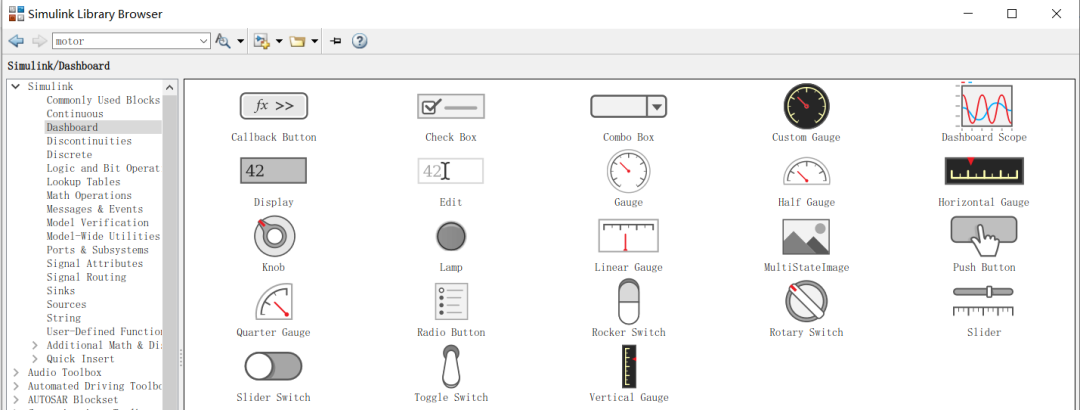
左上角是驾驶控制控件。 通过操纵这些控件,可以控制转向、油门、刹车等。这些控制模块来自Simulink--->Dashboard工具箱。 如下所示:
您可以将这些控制模块与模型中的参数关联起来,轻松调整参数,然后就可以愉快地玩游戏了。
由于是基础演示,因此车辆模型已被大大简化。
对于3D场景,渲染引擎使用Unreal Engine。 MathWorks 与游戏引擎 Unreal Engine 相结合,构建高保真驾驶场景。
对于传感器模型和车辆模型部分,Matlab的自动驾驶工具箱提供了与Unreal Engine场景交互的摄像头、激光雷达、毫米波雷达等。
在这个demo中,默认的3D场景是密歇根大学的MCity,改为一个大型停车场场景,汽车模型也发生了变化。
另外,车身上放置了一个摄像头(下面视频左下角的图像就是这个摄像头生成的),仅用于显示,不用于处理。
以上是Simulink模型部分。 另外,因为我们需要运行虚幻引擎的3D场景,所以我们要准备一台高性能的PC。 我们这里不需要实时模拟机,个人电脑就可以了。
虚幻引擎的最低计算机性能要求:
经过实际体验,想要获得好的体验,电脑性能必须远高于这个配置,尤其是GPU。
我们使用的电脑是Intel NUC8I7HVK4 Core I7-8809G Pluto Canyon(下图),GPU是AMD RX Vega M GH,性能非常强劲,运行非常流畅。

demo版实用视频如下:
整个系统在Simulink中完成,不需要任何其他软件或硬件。 简单明了,能够清晰地呈现驱动在环系统的架构。
这是游戏机!
第二个位置是在游戏机上安装控制器。
第二个姿势和第一个基本一样,只是多了一个手柄~
第一种姿势有两个肉眼可见的缺陷:
让我们进行升级,添加游戏控制器,并增加车辆的复杂性,以满足各个年龄段的男孩和老人。
游戏手柄
游戏手柄采用HORI FPS PLUS。

手柄接口为USB,可直接插电脑。
手柄上有很多操作按钮,这些按钮信号需要读入Simulink中。
Simulink 提供控制器驱动模块(也适用于 Logitech 控制器)。 驱动程序模块是 Simulink 3D 动画工具箱的操纵杆输入。
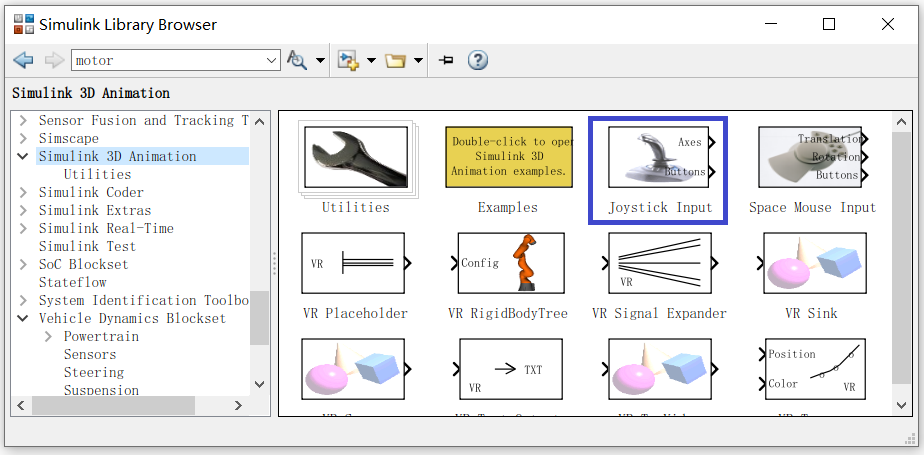
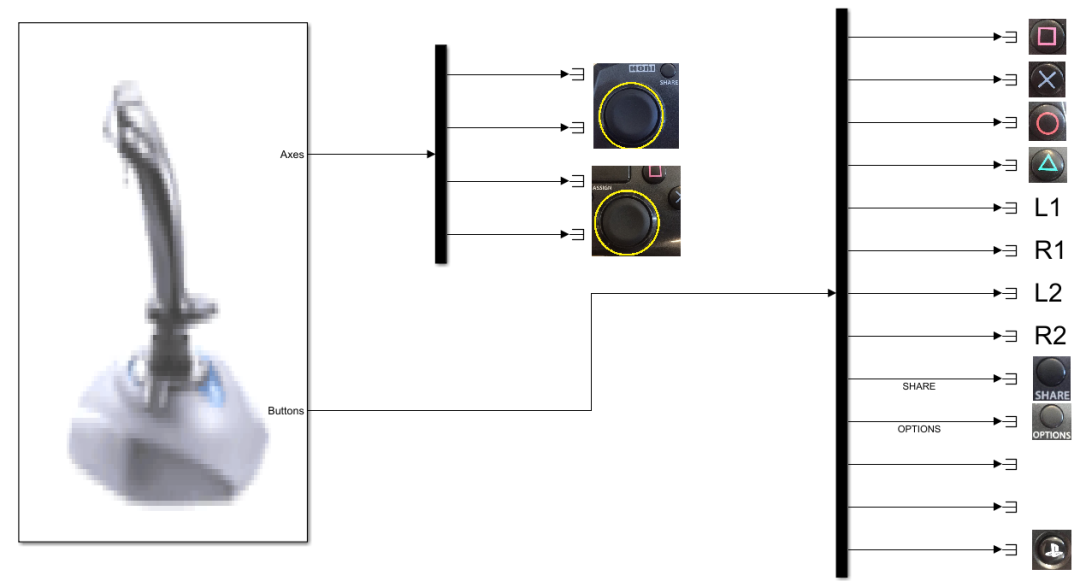
Joystick Input 的输出轴和按钮包含很多信号,需要预先校准手柄按钮与这些信号的对应关系。
校准方法非常简单。 将 Joystick 输入拖到 Simulink 模型中,按下手柄上的按钮,然后查看 Joystick 输入的哪个输出信号发生变化。 校准结果如下:
车辆型号如下
需要对这个模型进行一些调整,比如将可变步长改为固定步长、用Joystick Input替换驱动程序模型、替换3D场景等。
整个架构如下图:

一切准备就绪后,就可以开始愉快的玩耍了,这样就多了几分刺激。
第三个位置是分离整个车辆模型。
以上两个版本纯属自娱自乐,只能离线玩(如极品飞车)。
当车辆模型在普通PC上运行时,实时性无法保证。 还是有点软,不够硬,不够凉!
比如我们小时候玩虎克船长这样的游戏,一旦坏人大量出现,游戏机内存耗尽,就会卡住。
因此,我们将进行升级,使测试方案更加先进,让车辆模型在实时仿真硬件中运行。
游戏手柄更换为罗技G29。 罗技 G29 是一款入门级驾驶模拟器。 它有USB接口、方向盘和踏板,方向盘有反馈。 它提供了出色的驾驶体验。 。

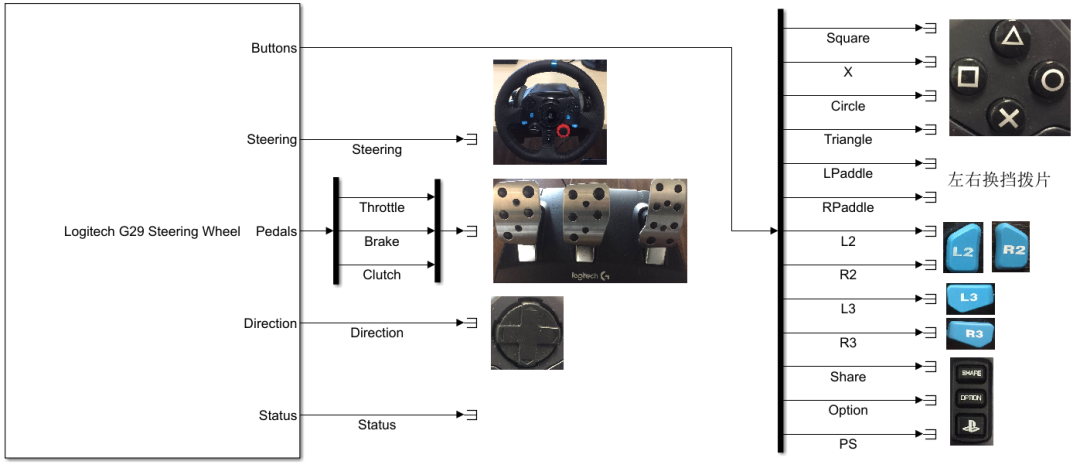
同样,G29也需要一个驱动模块来将信号连接到Simulink。 操纵杆输入仍然有效。 此外,Simulink 在 Simulink Real-Time 工具箱中提供了专用的 G29 驱动程序模块 - Steering Wheel Read。
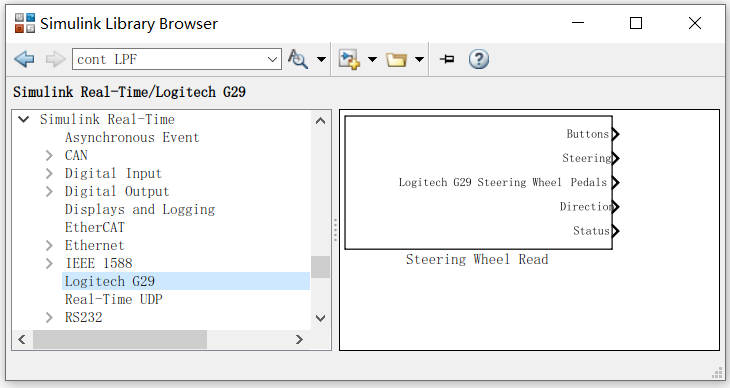
校准 G29 和方向盘读数。
实时模拟器用于运行整个车辆模型。 它可以从任何主流制造商那里找到。 各大厂家都有相关产品。 它可以是 HIL 设备或快速原型。 它们本质上是同一件事。
第三姿势出现了一个非常重要的现象:多机协作
在经典的HIL架构中,例如dSPACE开发的发动机控制器HIL,多机协作是指编辑测试用例和编译模型的PC与运行模型的实时仿真机之间的分离。 目前描述的第三种姿势,它的“多机协作”是指场景运行在普通PC上,车辆动力学模型运行在实时仿真机上。
场景相关部分仍然在主机上运行。 原因在于,实时操作系统本质上是一台缺乏GPU的大型单片机,几乎没有实时操作系统能够支持3D场景软件。
。
第三姿势的结构如下图。
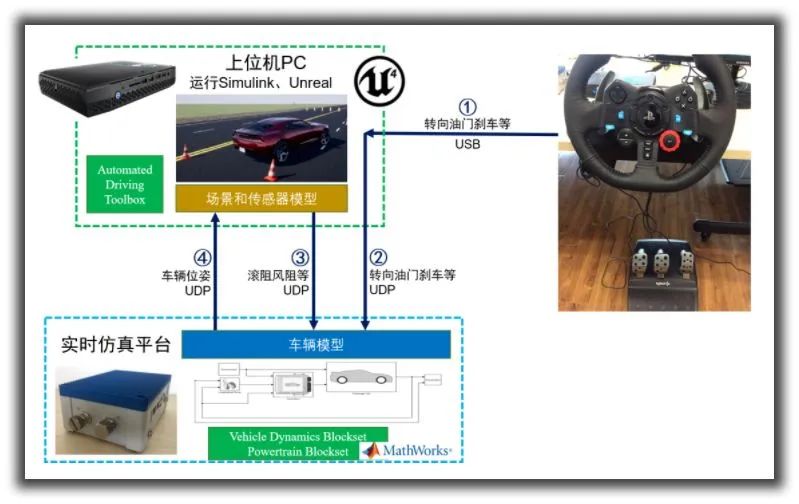
实时仿真平台和上位机各运行一个Simulink模型。 前者是运行车辆模型,后者主要是运行场景相关模型。
接下来就可以再次愉快的玩游戏了。
第四个位置是分离整个车辆模型。
上述所有解决方案都是基于手动驾驶。 甚至第三种姿势也没有自动驾驶模块,完全依赖手动操作。
从现在开始,我们需要考虑到自动驾驶。
上位机场景软件可输出传感器(摄像头、超声波、激光雷达)的检测结果。 我们将这些传感器的检测结果通过对象列表级别发送给实时仿真机,由实时仿真机进行融合和决策。
车辆模型,融合决策模型,把它们放在一起
架构如下:

实时仿真平台不仅运行车辆模型,还运行传感器融合和决策控制算法。
上位机PC将传感器模型检测结果发送至实时仿真平台。
需要提到的是,这个检测结果是物体列表级别的,而不是图像、激光雷达点云等。说白了,这个方案的传感器识别是通过模型来实现的,而不是通过真实的测试物体进行检测。
一个最基本的两机无人驾驶演示Demo已经实现了。
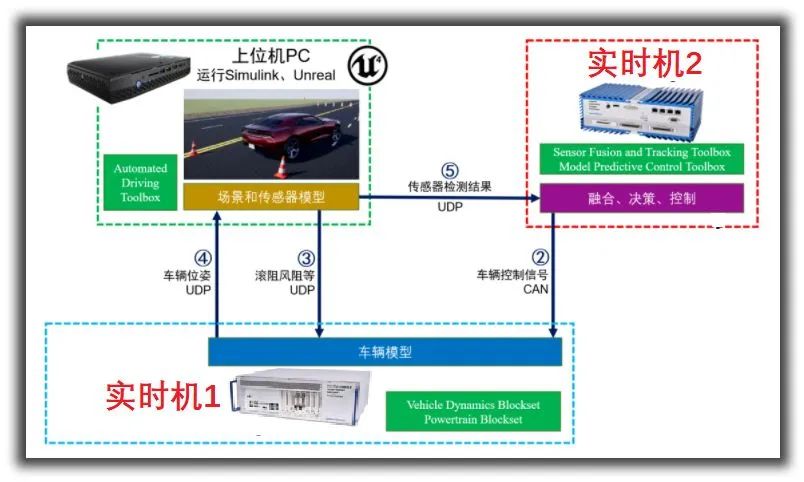
第5步:添加实时机器来做出融合决策
上面的例子都有一个特点:
纯属自娱自乐,不涉及DTU,既没有待测设备,也没有快速原型。 除1、2、3三种姿势外部信号采集属于实物外,其他工作均在PC机中虚拟完成。
该解决方案大部分仍用于科研回报演示。 对于DTU的实际算法来说用处不大。 接下来我们介绍一下DTU或者RCP。
通常情况下,无论是车企还是供应商,自动驾驶领域的主要测试工作都是识别和融合决策。
对于识别过程,目前已有不少传感器供应商能够完成。 他们的相机控制器可以直接在对象列表级别输出 CAN 信号。
事实上,大多数用户在集成决策过程中只能做出手势。 这是最不困难的部分,试错成本较低,可以让用户练习技能。
第五种姿势架构如下图。 添加“实时机2”。 将“融合与决策控制”的功能模块从实时机1中取出,移至实时机2中,用户可以随意做,做实验。
姿势六、从霰弹枪切换到大炮,并执行识别功能
如果传感器供应商实力比较弱,无法进行识别怎么办?
没关系罗技摄像头软件,我们可以选择更强大的ADAS控制器或快速原型,并负责识别工作。
于是,著名的感知环测试验证方法就诞生了。
世子一号无情地把Posture 5中的薄型快速原型机换成了NVIDIA Drive PX2或者Xavier,从而打造出了下图所示的Perception-in-loop测试框架。
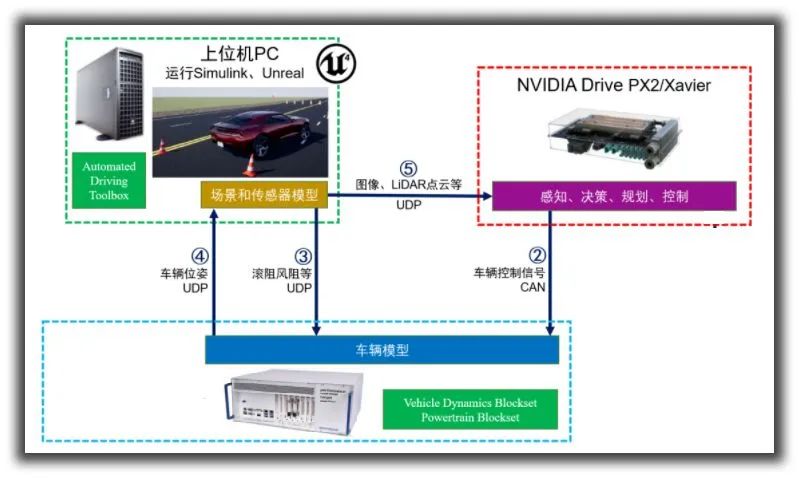
信号流⑤是主机PC发送到NVIDIA Drive PX2/Xavier的图像和激光雷达点云等原始数据,而不是对象列表级数据。
NVIDIA表示没有压力,毕竟世界第一的实力可不是吹牛的!
姿势7,没有最好,只有更棒
第五个手势输出识别出的对象列表,第六个输出是原始图像。
那么,有什么新的玩法吗?
一定有!
第七个手势是输出图像和对象列表之间的私有协议数据。 这个东西就像是相机传感器和相机控制器之间的传输协议。 行业没有统一标准,需要定制!
因此罗技摄像头软件,您也会在市场上看到这样的解决方案:
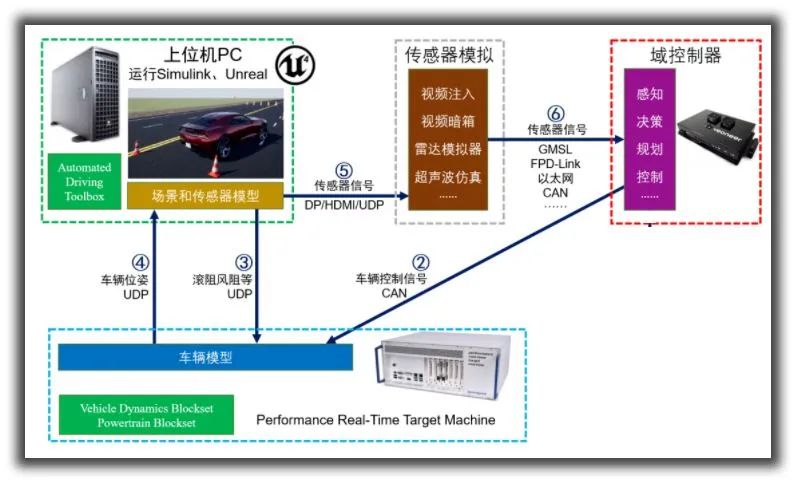
这应该是目前市场上技术难度最高、最先进、成本最高的无人驾驶测试方案……你买了,走出大门后气质恐怕会不一样。
总结
无人驾驶测试方案的设计相对灵活。 不同的方案有不同的技术指标、不同的侧重点、不同的使用方法,这都会对后续的使用和公司的系统建设产生影响。
无论HIL解决方案如何千变万化,都逃不开世子一号《HIL27讲座:从根本原理谈HIL切割方法》中提到的“虚实切割”的概念。 有兴趣的朋友可以到《车辆科技》公众号主菜单“原创干货资料”→“原创连载”中找到这篇文章,看一下。
如果“切入点”更靠外,放置在摄像头传感器前面,就会成为“黑匣子”解决方案。 这种方案受环境影响较大,不符合逻辑的特点,所以不再介绍。
车辆技术公众号认为,需要根据自身情况选择最适合的测试技术路线。
【推荐】

