本文创新性地集成了自动化立体仓库、AGV、复合机器人、双臂机器人等智能设备,设计了一套智能机器人仓储物流系统,并开发了主控和调度软件,实现了机器人稳定有序的运行。每个设备。 。
针对AGV定位不准确的问题,本文提出一种二维码视觉精准定位的方法,从而提高仓储物流系统的稳定性。
1、智能机器人产线物流
仓储系统解决方案
1.1 方案概述
图1所示为本文设计的智能机器人仓储物流系统总体方案。 它集成了自动化立体仓库、AGV、机器人、视觉传感器、激光传感器等,机器人完成物料的拣选、放置、运输和分拣。 视觉系统完成对物料形状、位置和颜色的识别,传感器完成移动机器人的定位和避障。 该系统实现了齿轮箱的拆装,适用性广,衍生能力强。 设计的齿轮箱装配工艺流程如图2所示。
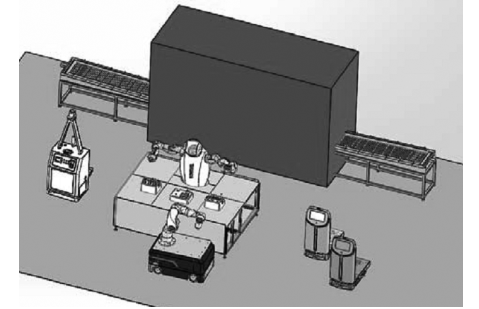
图1 智能机器人仓储物流系统解决方案
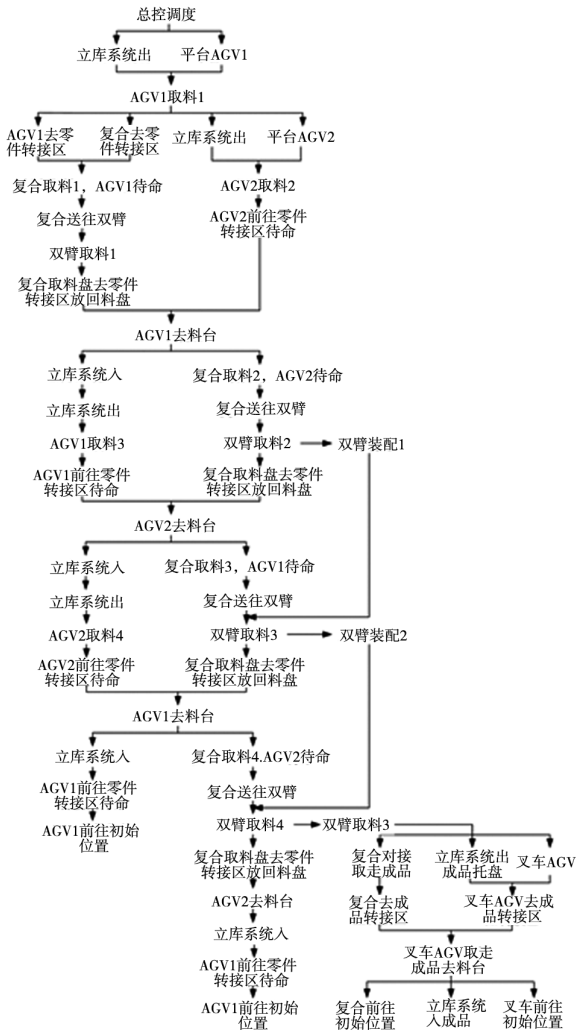
图2 变速箱装配工艺流程
1.2 硬件系统
智能机器人仓储物流系统主要包括自动化立体仓库、平台AGV、复合机器人、双臂机器人、叉车AGV等硬件设备。
(1)自动化立体仓库
自动化立体仓库是现代生产系统自动化程度提高的重要标志。 可以在有限的占地面积内实现货物的大量有效存储,充分利用空间资源。 如图3所示,本文设计的自动化立体仓库包括货架、堆垛机、出入口平台。
其中,堆垛机的行走轴使堆垛机能够沿立体仓库的长度移动,起升轴使堆垛机能够沿立体仓库的高度移动,伸缩叉轴使抓取货物托盘。
装卸平台安装有货物托盘检测传感器,用于判断装卸平台与机器人的对接情况。
零件装卸平台设有升降运输平台①,低位时与平台AGV连接,高位时与装卸平台②连接。
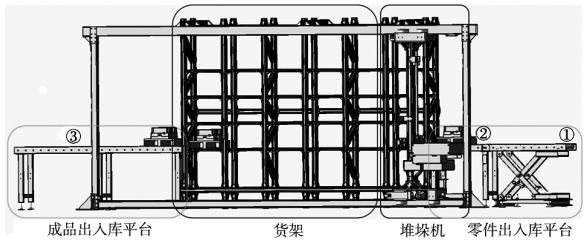
图3 自动化立体仓库
设计并开发自动化立体仓库。 其管理系统具有货物入库、货物出库、进出库人工修正、库存盘点、设备状态查询、设备故障记录等功能。 它可以自动记录设备故障信息,包括设备编码和故障时间。 、故障类别、故障描述等。故障排除后,操作人员在记录中填写故障排除时间信息,可根据设备代码、故障类别等查询设备故障记录,以及查询结果以列表的形式显示在计算机屏幕上。 并且可以打印出来。
(2)平台AGV
平台AGV可以实现自动化、可靠的运输和物品的自动配送。 它配备了激光传感器和超声波传感器。
基于激光SLAM的定位导航算法,结合超声波传感器,实现自主行走、自主避障。 其控制台可以集中调度、监控和管理AGV系统的运行状态活动。
(3)复合机器人
该复合机器人由全向移动底盘和铰接式柔性机械臂组成。 它集成了视觉系统、多样化导航配置、高精度二次视觉定位等高端技术,使机器人更加精准、智能。
可广泛应用于3C行业、自动化工厂、仓储分拣、自动化商品超市等,实现自动化物料搬运、物品装卸、物料分拣等。
(4)两臂机器人
双臂机器人由两个7自由度柔性机械臂组成,可集成灵活地实现拧紧、定位等快速、安全、灵活、精准、高效的完整装配解决方案。
机器人系统配备视觉系统,具有视觉识别引导和抓取功能。 末端采用电控夹具,实现工件的稳定抓取。
(5)叉车AGV
叉车AGV有激光引导系统、控制台和调度管理系统、在线自动充电系统、通讯系统和安全系统等,控制台和调度管理系统是AGV系统的调度管理中心。 它们负责与上位机交换信息,生成AGV操作任务,并向AGV发出指令,完成相应的任务。
(6) 齿轮箱
变速箱模型如图4所示,包括上箱体、下箱体、主动齿轮轴和从动齿轮轴。
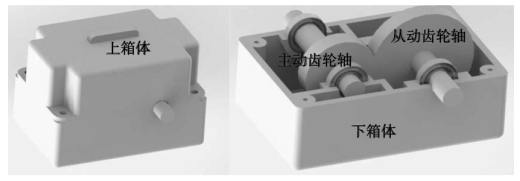
图4 变速箱
1.3 软件系统
智能机器人仓储物流系统主要由通用控制调度软件和立体仓库监控软件组成。 三维仓库监控软件主要用于三维仓库状态反馈,以及零件/成品的入库和出库。
总体控制与调度软件负责管理和控制所有设备,协调各设备的工作,完成总体传输工作控制过程。 总体控制调度软件与其他跟踪模块的关系如图5所示。
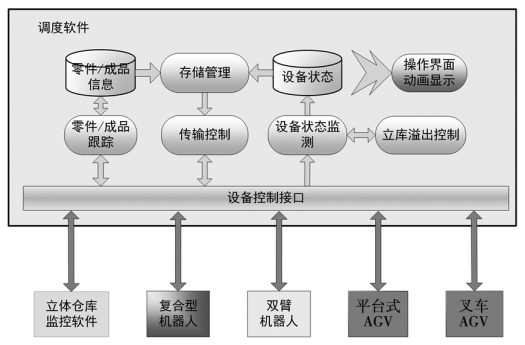
图5 软件结构图
系统中所有设备通过TCP/IP协议进行通信,如图6所示。通过路由器构建局域网。 双臂机器人、立体仓库监控软件服务器、总控调度软件服务器通过有线方式接入局域网,复合机器人、平台AGV、叉车AGV则接入局域网无线方式。
在该局域网中,主控调度软件是整个系统的核心,可以直接监控其他设备的状态并控制这些设备执行相应的动作。
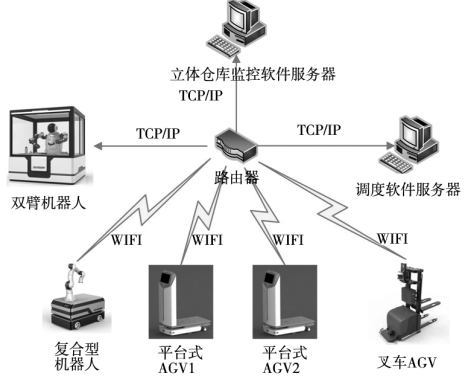
图6 电气系统组成
1.4 系统布局
考虑到智能机器人仓储物流系统的工作流程、机器人的转弯半径、工作空间、场地等约束,进行智能机器人仓储物流系统的布局设计。 布局如图7所示,图中虚线代表叉车AGV的运行路线。 ,粗实线代表复合机器人的运行路线,细实线代表平台AGV的运行路线,两个平台AGV交替工作。
复合机器人与叉车AGV在中转站完成货物的取货和配送,复合机器人与平台AGV在中转站完成对接。
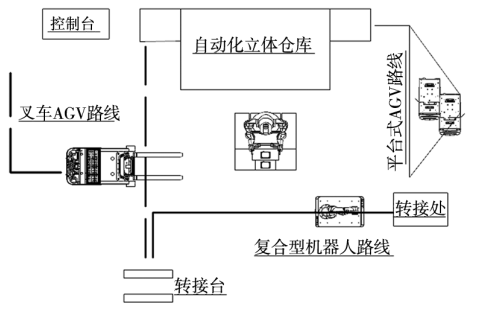
图7 智能机器人仓储物流系统布局
1.5 软件功能设计
本文设计开发的主控调度软件是在Visual Studio平台上使用C#语言开发的。 C#是一种安全、简单、稳定的面向对象编程语言,是.NET开发的首选语言。 总体控制调度软件具有以下功能:
(1) 零件/成品追踪:
整体控制与调度软件不仅存储零件/成品的属性(型号、数量、规格等),还更新零件/成品当前的运行信息(产品类型、入库时间、出库时间、货物位置号码、运输载体等)实时)。
(2)传输控制:
平台AGV和叉车AGV的控制包括车辆到目标点的设定、暂停、复位、装载、卸载、速度设定等; 复合机器人的控制包括车辆到达目标点的设定、上下料动作; 立体仓库控制包括货物的进出、暂停、复位、装卸等动作。
(3)设备状态监控:
平台AGV和叉车AGV的状态监控包括AGV位置监控、电量监控、货物状态监控和运行状态监控等; 复合机器人的状态监测包括位置监测、电量监测、货物状态监测、使能状态监测和空闲状态监测。 ETC。; 双臂机器人状态监控包括机器人使能状态监控、机器人空闲状态监控、料台上下料完成状态监控等;
立体仓库状态监控包括立体仓库堆垛机启用状态监控、闲置状态监控、货架上货物状态监控、出入口平台空间状态监控、出入口平台装卸完成状态监控, ETC。
(4)存储管理:
包括货架库存信息、立体仓库进出历史信息记录和事件日志信息。
(5)人机交互界面:
包括信息显示、手动操作和自动操作界面。
2、二维码视觉精准定位
本文设计的智能机器人仓储物流系统对AGV和复合机器人移动底盘的定位精度要求较高,特别是平台AGV与三维仓库升降运输平台对接以及复合机器人与平台AGV对接时。 目前普遍采用的移动底盘导航方式很难满足需求。
为了解决目前AGV常用导航方法精度低、实时性差、无法实现姿态校正等问题,提出一种二维码视觉精准定位方法。
将视觉相机安装在AGV中心底部物流仓储软件,使相机的光学中心与AGV的旋转中心重合,并在相机周围安装光源,以克服光线变化的影响。
通过识别地面上的二维码,通过视觉处理将数据反馈给AGV运动控制系统,实现AGV的精准定位。
2.1 二维码轮廓处理
为了突出二维码的轮廓,本文在原二维码的基础上添加了一个矩形的外轮廓,中心与二维码的中心重合,如图8所示。
采用外轮廓为矩形的二维码,检测效果好,不易被误检测。 可以显着提高边缘检测的正确识别率。

图8 二维码轮廓处理效果
2.2 位移处理方式
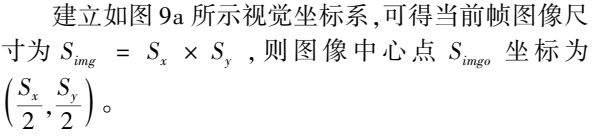
通过图像边缘检测提取二维码的矩形轮廓和四个顶点坐标Pi(xi,yi),i=1,2,3,4,计算出二维码的中心点坐标P0(x0,y0) ,如式(1)所示:
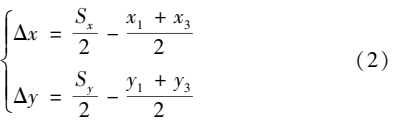
根据公式(2)计算二维码中心点与当前图像中心点之间的偏移量(Δx,Δy):
根据(Δx,Δy),AGV可实现4个方向的自由纠偏运动。 位移校正运动方向如图9b所示。 经过位移处理后物流仓储软件,二维码的中心可以与视觉图像的中心相匹配。
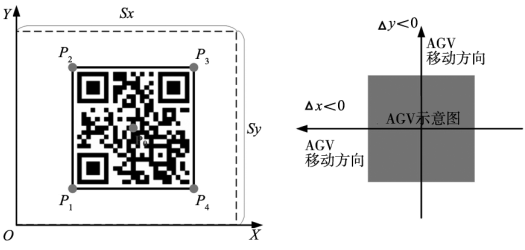
(a) 视觉坐标系 (b) 位移校正移动方向
图9 位移处理模型
2.3 旋转处理模型
旋转过程以中心点为旋转参考点,进行旋转校正,如图10a所示。 设P0(x0,y0)为轮廓中心点坐标,B(x23,y23)为待校正矩形一侧中心点坐标,A(x'23,y' 23)作为校正后的矩形一侧的中心点的坐标。 。
根据P0和B点的坐标计算A点的坐标,如式(3)所示:
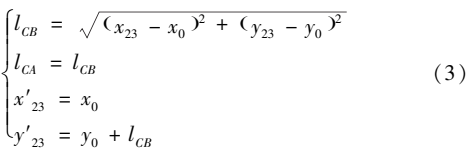
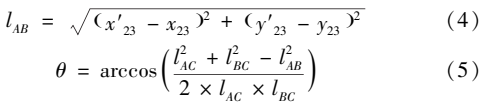
因此,根据式(4)和式(5),可以得到A点和B点之间的距离以及旋转角度θ。 旋转校正方向如图10b所示。
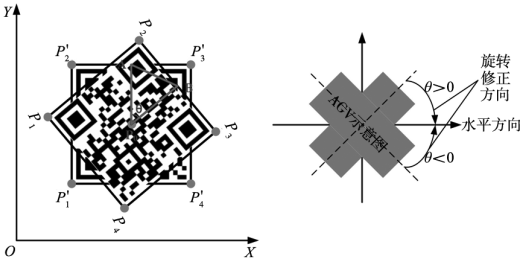
(a) 旋转图 (b) 旋转修正方向
图10 旋转处理模型
AGV经过视觉位移处理和旋转处理后,可以调整AGV当前的姿态,提高AGV的定位精度,保证AGV与其他设备可靠稳定的对接。
3. 申请验证
通过变速箱的模拟拆装验证了本文智能机器人仓储物流系统的应用。 通过主控调度系统软件与各机器人系统的通讯,可实现变速箱的组装和拆卸。
经过长期运行和反复测试,设计开发的主控调度软件能够正确显示各设备的状态,具有良好的用户界面,具有良好的工作性能。
软件运行结构如图11所示。图11a中的每个按钮代表每个机器人的不同动作,主要用于调试和单步运行。
图11b显示了自动操作过程。 装配模式启动后,主控调度软件将按照指定的4个零件出库,然后通过平台AGV和复合机器人将其运输至双臂机器人装配台。 组装好的成品放回成品托盘中。 成品托盘由复合机器人和叉车AGV运输至成品仓库。 零件托盘由复合机器人和平台AGV运回零件仓库。
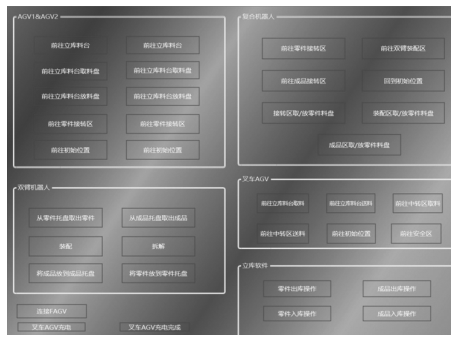
(a) 手动操作界面

(b) 自动操作界面
图11 自动运行流程示意图
装配过程中的一些动作如图12所示。图12a中的四张图分别描述了立体仓库堆垛机取料盘、堆垛机将料盘放置在零件出入平台、出入平台输送物料托盘、平台AGV与出入口平台对接输送物料托盘等流程。
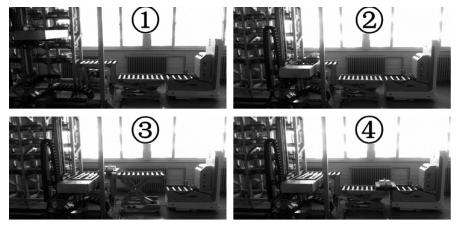
(一)三维仓库发货、平台AGV取货流程

(b) 复合机器人与平台AGV对接、拾取货物的过程
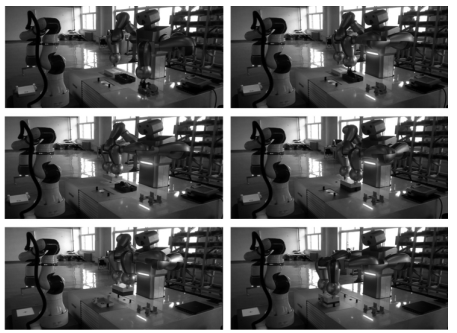
(c) 双臂机器人的装配过程

(d) 叉车AGV拾取托盘流程
图12 自动运行流程示意图
变速箱的拆装过程严格按照工艺流程进行,验证了本文设计的智能机器人仓储物流系统的可靠性和稳定性。
平台AGV与仓库出入库平台的成功连接验证了本文二维码视觉定位的有效性和稳定性。
4。结论
本文集成了自动化立体仓库、AGV、复合机器人、双臂机器人等智能设备,设计了一套智能机器人仓储物流系统。 同时开发了主控调度软件,对所有机器人进行管理和控制,协调各机器人稳定有序运行。 。
同时,为了解决AGV定位不准确的问题,本文提出了一种对二维码进行精确视觉定位的方法,从而提高仓储物流系统的稳定性。 该系统经过多次变速箱拆装测试,验证了系统的有效性、实用性和可扩展性。

知名企业
读者福利:
甲乙双方的人脉关系与对方的神器相匹配 --->
企业信用修复--->
福利
知识社区:主要包括智能仓储物流自动化规划设计、自动化立体仓库、智能机器人、自动化拣选系统、仓储管理软件WMS、AGV/AMR应用等。
免费提供一些解决方案、行业报告、PPT、电子书、手册、技术资料等干资料(目前30G+,并且实时更新),全部可供下载。
