行万里路 筑万里桥(三十)我们的桥梁装备创新之旅(二十五)黄耀毅
【前言】这篇《巡检笔记》的内容是根据我的工作日记、技术总结以及亲身经历整理而成的,因此其内容详实,值得一读。
42 “十大国重装备”——黄耀义《1000t/40m昆仑高铁运输架桥机总体设计详解》
[《建筑机械杂志》推荐此文的推文截图]:
【摘要】本文系统介绍了一种新型架桥机——高铁1000t/40m上梁昆仑运架一体机的总体设计与实现,包括其技术设计原则、主要技术性能参数、总体组成及实际整机应用情况。同时介绍了其分设计的主要内容,包括主梁、支腿系统、前后车走行系统、挂梁升降系统、液压控制系统、电气系统等设计,以及该机相关ANSNS结构辅助分析和典型架梁过孔工艺。最后总结了昆仑运架一体机的最大特点。
关键词:上导梁、运架一体机、总体设计、分体设计、应用
1 高速铁路1000t/40m上导梁昆仑运架一体机技术设计原理
高铁运架一体架桥机的全称是“高铁运架一体架桥机”,是一种集起重、运输、架梁功能于一体的大型架桥设备,是相对于分体式架桥设备而言的,分体式架桥设备由提梁机、运梁车、架桥机三台相对独立的设备组成,各自独立作业。
目前高铁运输架设设备主要有下导梁式和悬臂式两种,前者需要在桥洞上安装导梁,然后架桥机作为主机下行轨道通过桥洞;后者架桥机利用自身的悬臂梁作为架桥机移动支腿的导梁,以梁式反腿通过桥洞。
需要注意的是,现有技术包括整体式和分体式造桥设备,最大型号仅能架设自重900t、跨度32m的高速铁路PC箱梁,无法满足目前正在研制的高速铁路1000t/40mPC箱梁的架设要求。
现有的悬臂一体机最大的优点是可以自由运梁(运载PC箱梁)穿越隧道,与之相对应的是,其缺点是需要大型机具(长度超过90米,并配备两个大型支腿)往返于梁场取梁,从而带来一体机整体重量(特别是前轴重量)大、对行走通道的承载能力和空间尺寸(即空间的宽度、高度、曲线)要求高、修路投资大等一系列缺点。因此,如果以只采用一种机型架设1000t/40m PC箱梁计算,这一缺点将进一步被放大(整机总长度超过110m)。因此,需要开发一种具有优化解决方案的新机型,以满足我国高速铁路建设技术不断更新的需求。
本文所述昆仑上导梁一体机研制的战略目标是:1、满足山区多隧道高速铁路1000t/40mPC箱梁架设需要,发挥现有悬臂一体机上述优点;2、克服现有悬臂一体机存在的不足。
该新型一体机总体方案如图1所示,由运梁机和鼻桥系统两个相对独立的部分组成,运梁机可单独返回梁场取梁,鼻桥系统则留在桥头等待,鼻桥系统由固定式辅腿和活动式主腿支撑。
这款新机的突出特点是,可为用户提供上导梁开合式和上导梁闭式两种可灵活选择转换的施工方案。当运梁距离较远、道路环境条件较差、空间狭小、道路建设投资过大时,可选用开合式工作机构;当运梁距离较近、道路环境空间宽阔平坦时,可选用闭式工作机构,即运梁架梁机与鼻梁系统采用只合不分的一体化解决方案。本文对后者进行详细介绍,因为昆仑上导梁一体机首台样机计划在路况极好的地区使用(直接在桥上运梁,见图24)。另外,还考虑到当运梁路况非常好时,如果仍然采用开合式方案,上导梁将多出一个拆卸、复原过程,影响架梁效率。 因此首台样机决定采用上导梁只合不分的整体方案,这一方案在福厦高铁上也得到了实际应用,且二者在整体结构和技术设计工作上只有细微的差别:即上导梁开合接头与普通接头在梁体需要分段(汽车运输要求)等细节上并无区别。
我们先介绍开闭式方案的运作流程,如图2所示,下面针对图中程序编号进行具体说明。整体合而不分(即闭式)的方案将在后面详细介绍。
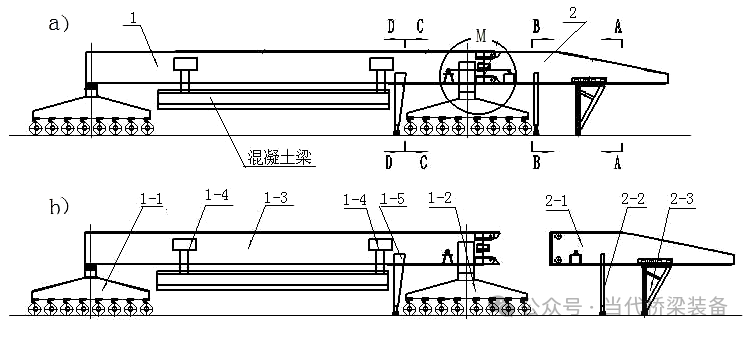
图中:1 运梁机 2 鼻桥系统 1-1 后车 1-2 前车 1-3 机臂 1-4 举升系统 1-5 固定中支腿 2-1 鼻桥 2-2 轻型副支腿 2-3 移动式主支腿 M 开合关节机构
图1 新型上导梁式运输架一体机开合闸方案总图
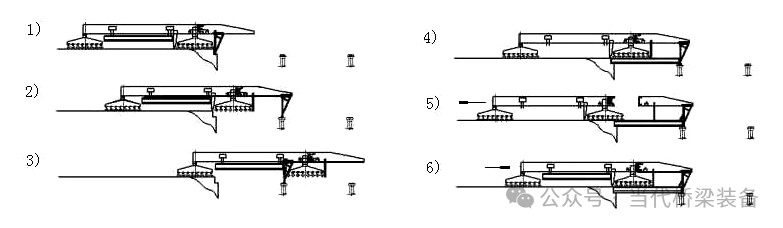
图2 新型上导梁式一体化运输及框梁工艺流程图(开合方案)
步骤1:如图2-1)所示,架桥机在制梁现场组装,将要架设的首梁吊运至桥头架梁:移动主腿(2-3)支撑在桥台承台上。同时启动架桥机主腿(2-3)上的滚轮系统和后车(1-1)的驱动系统,推动架桥机纵向通过孔道。
第二步:如图2-2)所示,前车(1-2)后轮已离开桥台,单箱形鼻梁(2-1)前端已越过前墩,停止纵向移动,将固定中支腿(1-5)支在桥台胸墙顶部。柱脚处液压千斤顶顶起,使活动主支腿(2-3)离开墩顶面,向上折叠并自动立在前墩前侧垫石上。
第三步:如图2-3)所示,收回中腿(1-50)千斤顶,架桥机继续经孔纵向移动,直至将混凝土箱梁运送至第一跨顶部,即可将梁下放就位。
第四步:如图2-4)所示,梁就位后,运架梁机(1)由主腿(2-3)及后车(1-1)滚轮支撑,后退至已架设梁的桥面位置。
第五步:如图2-5所示,主支腿(2-3)支撑在墩顶并固定到位,用标准斜撑锚固在已架设梁头梁孔内,以保护安全;副支腿(2-2)用柱脚千斤顶支撑在桥面上。然后,解锁伸缩接头M,使运梁机(1)与鼻梁系统(2)分离。运梁机(1)返回梁场运梁,鼻梁系统(2)留在桥上等待。
第六步:如图2-6)运梁架梁机(1)将梁运回架梁现场,与余桥鼻梁系统(2)进行对接合拢作业,架桥机恢复整体,开始架梁作业,按第一步重新开始新的架梁循环。
2 高铁1000t/40m上梁昆仑运架机总体组成
2.1主要技术性能参数
(1)梁跨度:24m、32m、40m
(2)架设梁型:高铁双线简支PC箱梁
(3)架梁方式:一体机(封闭式)连续进行“起梁→运梁→架梁”一条龙作业
(4)额定起重能力:1000t
(5)适用线路曲线:R≥2000m,高铁350km,隧道250km
(6)适应线路纵坡:i≤3%
(7)机械作业:适应道路曲线R≥200m,纵坡i≤4%,重载速度5km/h,空载速度10km/h
(8)机器行走系统:前车10轴/20悬挂/40轮胎/车轮直径1734mm,后车11轴/22悬挂/44轮胎/车轮直径1734mm
(9)挂梁升降速度:0~0.5m/min
(10)通孔机臂跨中挠度:38cm,挠跨比1/250(符合ISO22986-2007标准)
(11)外形尺寸:长×高×宽=116.2米×9.2米×9.9米
(12)整机重量:960t
2.2 昆仑运输架设机结构
该机由主梁、前车系统、后车系统、中支腿、主支腿、前起升小车系统(前固定吊架)、后起升小车系统(后活动吊架-适应变跨梁工况)、电气系统、液压系统、伺服系统、安全保护系统等组成,如图3、图4所示。
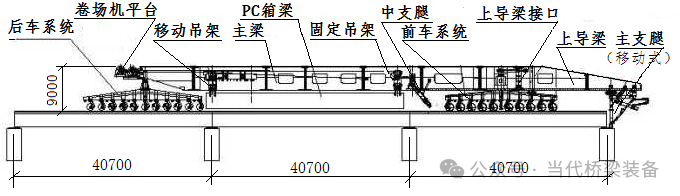
图3 昆仑运输架设机整体视图(垂直视图)
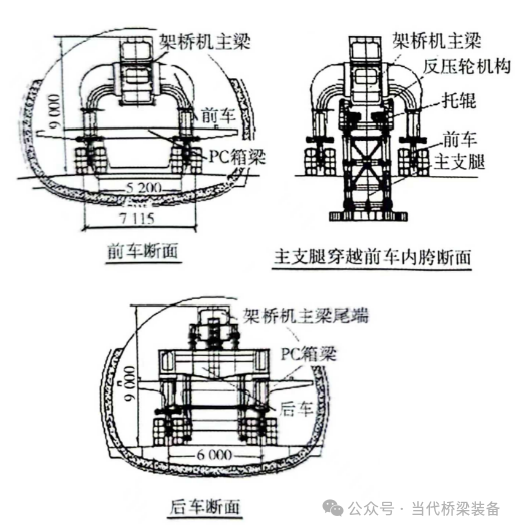
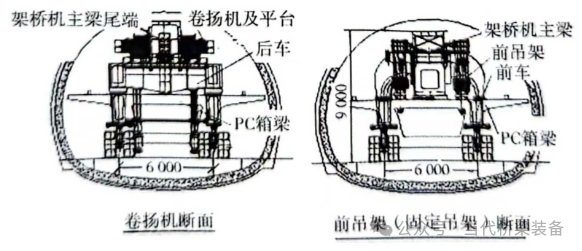
图4 昆仑运输架设机全貌(下)(剖面图)
2.3 昆仑运架机过隧道净空的确定
构建大悬臂昆仑运架一体机整体空间轮廓,沿R=2000m高铁曲线隧道中心线进行步进运动论证,能否判断实体一体机横梁能否自由通过?论证计算结果如图5所示,能够通过。

图5 昆仑运输架设机通过隧道净空图
3 分部设计
3.1 主梁
如图3所示,架桥机主梁为异形空心钢箱梁,所用钢材为可焊接高强度结构钢HD785D,屈服强度σS=685Mpa。为单根主梁,其标准截面如图6所示。注意为п形和ц形上下梁叠合,中间腰线段两边用螺栓连接。这是为了在极限范围内满足长途卡车运输的需要。
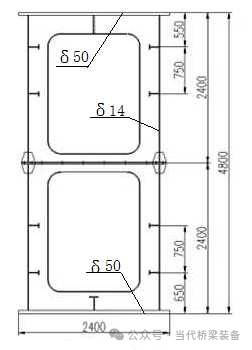
图6 空心钢箱梁标准截面
本次钢梁设计的控制因素为:在架设40m梁时,架桥机承载PC箱梁通过洞口达到最大简支跨度状态,如图7-1)所示,此时计算跨度为96.29m,状态1)对应的加载图如图7-2)所示。
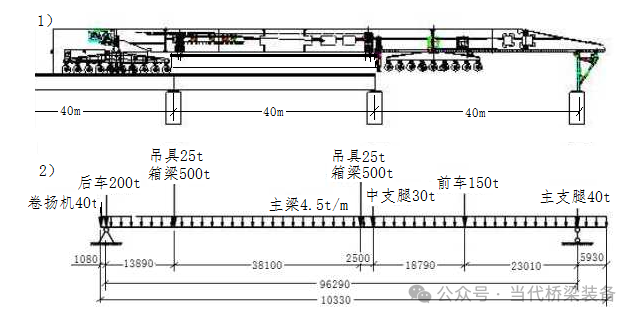
图7 40m带梁孔梁最不利工况及荷载图
采用ANSYS软件对昆仑整体框架梁过洞的全过程进行模拟分析,并对整体结构特别是异形空心钢箱梁的强度、刚度进行辅助计算,以验证基于经典和规范以及我们采用实用方法(另文介绍)得出的设计计算结果。得到的ANSYS结构分析结果如图8所示。
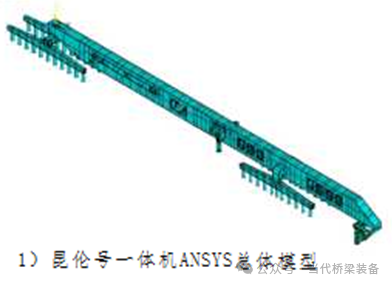
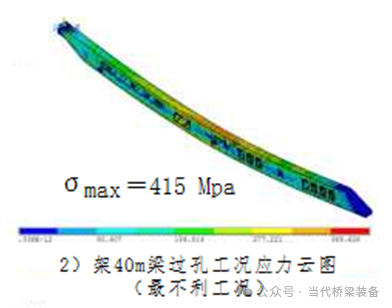
图8 图7所示工况对应主梁应力云图
3.2 主要腿部
主支腿为倒三角空间结构,可沿主梁下翼缘前后移动(自主),可收放(满足不同支撑点高度要求),底部横梁设有旋转机构(满足曲线梁架设要求)。这种倒三角主支腿最大的优点是不需要在墩顶设置锚固结构,解决了以往每个墩顶埋设锚固结构相当费时费力、费力、费钱的问题。倒三角支腿避免墩顶锚固结构的原理是利用“动态
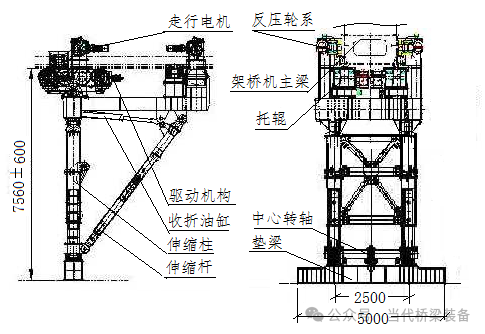
图9:昆仑一体机主支腿结构示意图

图10 桥台(桥面)主腿支撑状态(方便架桥机移动)

图12:主腿折叠至桥面(桥台)(方便架桥机移动)

图11 主腿支撑于墩顶实拍
该发明是“静态防锚固机构”,也就是我们把主腿的倾覆力矩转移到倒三角形的两个上顶点来抵抗。详见图9、10、11、12。
3.3 中支腿
中支腿固定在前吊架前侧,作为主支腿前移时的主要承重结构,并具有横移功能(装有横移机构的横向垫梁),辅助主支腿纵向移动到前墩顶对中,实现曲线梁架设。架桥机在梁场起梁后需水平回转90o时,中支腿油缸升起,卸掉前车悬架轮胎并回转(后车利用支腿油缸升起回转90o),详见图13、图14。
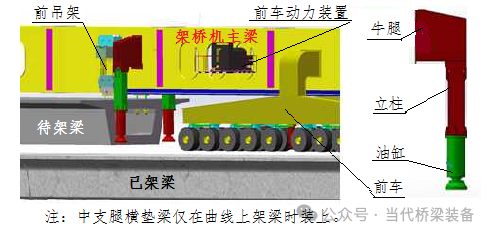
图13 中腿布置效果图
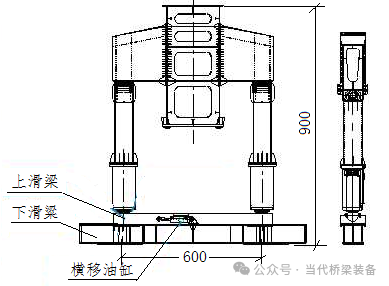
图14 中腿下垫梁横向运动机构
3.4 小车行走系统
3.4.1 小车行走系统总成设计
小车行走系统分为前车系统和后车系统,与普通车辆一样,既是主要承重结构,又是行走机构。本运架一体机所采用的轮胎组为液压悬挂轮胎组,其装配设计如图15、16所示,其工况示例如图17所示。其总体功能应达到:整机作业:适应道路曲线R≥200m,纵坡i≤4%,重载速度5km/h,空载速度10km/h。
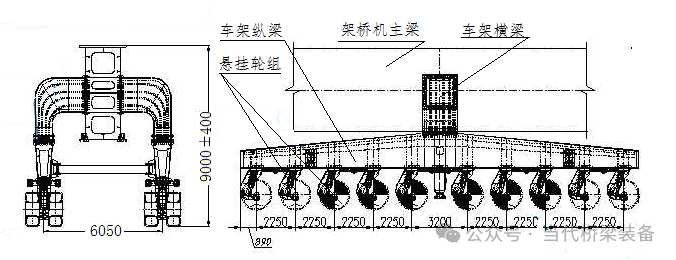
图15 前车系统装配图
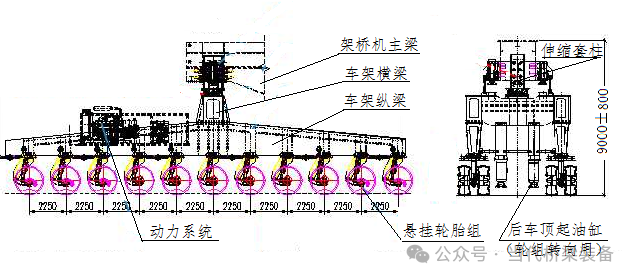
图16 后车系统装配图

图17 架桥机过洞时前车越过主支腿实拍
3.4.2液压悬挂系统工作原理及本机实际情况简介
卡车轮胎组液压悬挂系统的工作原理是通过液压缸操作电磁阀调节车架高度,使卡车轮胎适应不平路面的起伏,实现车辆整体水平行驶。若出现超差情况,可自动报警锁止,提高了行驶过程中的安全性。如图18所示。轮胎悬挂组分为主动轮组和从动轮组两种。
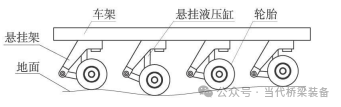
图18 小车悬挂工作原理
根据设计计算结论,前车采用10轴×4轮=40条轮胎;后车采用11轴×4轮=44条轮胎,前后车驱动轴各为6轴。轮胎直径×厚度=1734×698(mm),轮胎接地压≤0.6Mpa。悬挂举升程度为±400mm,以适应通过隧道和在隧道进出口架设梁的工况。特别是后车举升程度达±800mm,其中包括安装在主梁尾端的伸缩套的举升和收缩量。
3.4.3 货车车架结构ANSYS应力分析
为检验经典方法与规范方法计算结果的准确性,采用ANSYS对小车架结构进行计算。计算时,将前车左、右支架与钢箱主梁腹板连接面设为固定端约束,各悬挂反力设为竖向荷载加载。前车各悬挂加载1162.8t/20(向上);后车横梁中心为固定端约束,各悬挂加载1240.1t/22(向上)竖向荷载,考虑动载系数1.3。计算结果:前车最大应力σmax=363Mpa,后车最大应力σmax=443Mpa。
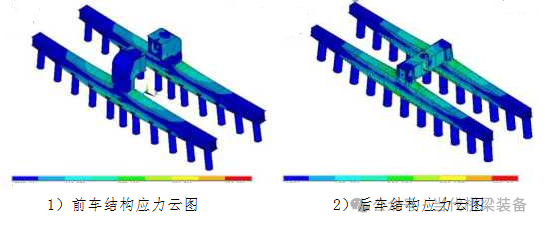
图19 货车车架结构ANSYS应力云图
3.4.4 动力装置和驱动系统
前、后小车的液压行走驱动动力源均为水冷式涡轮增压柴油机,通过弹性联轴器与同配置的驱动泵相联,驱动安装在驱动轮组内的液压马达和行星减速器实现行走。后小车的动力装置安装在其车体内(见图20),前小车的动力装置安装在其上方的钢箱主梁窗内(见图13)。
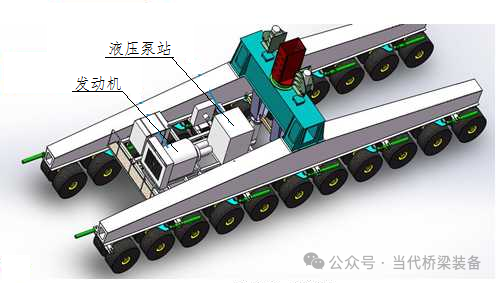
图20 后车动力装置安装
主液压油泵采用德国力士乐闭式变量泵,液压系统最高工作压力42MPa,安全可靠;行走马达采用力士乐产品,变量泵、辅助油泵均内置于主泵内。
3.4.5 转向系统
该运架机采用独立转向与连杆转向相结合的混合转向方式,可实现纵向行走、横向行走、斜行走及单端微动等多种功能。独立转向方式可实现原地水平功能(但需支腿油缸及中部支腿顶升辅助),提高了整机的灵活性,方便箱梁在梁场转运;连杆转向可实现行走过程中小角度转向。
转向系统采用自动控制,通过PLC控制多路比例阀的开度,控制各转向液压缸的伸缩位移和速度,再由角度传感器反馈车轮组的角度,使控制系统实时修正,实现各车轮组的协调、精确转向。
3.4.6 行驶制动系统
运输货架机采用双级制动系统,即行车制动系统和停车制动系统。
行驶过程中的制动主要是通过控制驱动电动机和驱动泵的排量(采用变量电动机和变量泵)逐渐降低汽车速度,实现由行驶到停车的过程;驻车制动系统是内置于驱动轴轮边减速器内的液压可释放的弹簧压力(多片式)停车制动器。
手刹是为了保证重载情况下机器在斜坡上停车时,能够安全启动。机器在斜坡上启动时,发动机启动,驱动泵启动。当驱动系统压力不足以满足斜坡停止和启动时,根据控制系统的设定,减速器内置的停车制动器不解除,停车制动器起作用;当系统压力足以满足斜坡停止和启动时,减速器内置的停车制动器解除,实现斜坡上安全启动。
3.5 起重小车
吊装PC箱梁的起重小车有前后两辆,前起重小车安装在图3中的固定吊架内,后起重小车安装在图3中的移动吊架内。设置移动吊架是为了适应跨度变换时后吊点位置的调整,而起重小车本身有左右±200mm的水平位移,以满足R≥2000m曲线上梁位的需要。起重小车的组成及安装如图21所示。

图21 昆仑一体机升降小车组成部件
3.5.1起重小车吊点平衡技术
吊点平衡技术设计是该机需要解决的重大关键技术难题。双线预应力混凝土箱梁两端各有4个吊孔,即共计8个吊点。桥梁设计文件要求,吊装过程中应采用整体吊装装置,确保各吊点平衡,否则梁体在空中将受到不规则的弯曲和扭转,可能产生裂缝。
具有8个悬挂点(约束)的箱梁为超静定体系,若此体系中任一悬挂点未按照其他悬挂点升起或放下,则8个悬挂点的反作用力将不相等,箱梁将产生内力。此体系通常由水平面支撑,承受垂直力,若有三个不在同一直线上的垂直铰支,且水平面内不发生刚体运动,则为几何不变的静定结构。因此,只要将上述超静定体系转化为静定结构,PC箱梁在吊装过程中就不会发生强迫扭转。
根据上述原理,通过专用吊装设备将箱梁两端的四个吊点转化为两个等效吊点(见图22)。先将一端的两个等效吊点通过钢丝绳缠绕串联起来,成为两个独立吊点,再将另一端的两个等效吊点串联起来,形成一个独立吊点,如图23所示。这样最终就达到了预期的效果,即建立了三个理论上的独立吊点,使物理上的八个吊点相等。在吊装过程中,八根挂杆的拉力相等,从而保证了PC箱梁在吊装过程中不会对梁体产生扭转力。
其实这一宝贵技术在我们研制我国第一台高铁架桥机TLJ900t架桥机时就已解决,但其机理和细节一直没有详细发表过,现在借此机会我想通过《建设机械》给读者做个详细介绍,供大家永远参考。
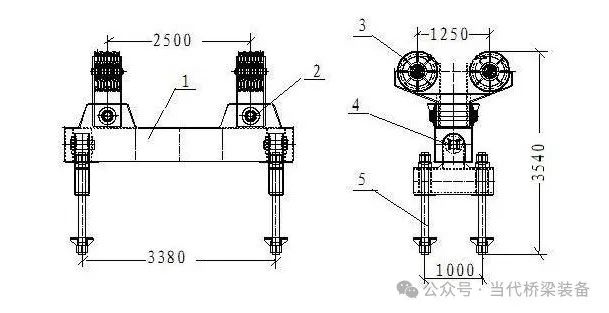
图中;1.平衡梁 2.上铰链销 3.滑轮组 4.下铰链销 5.吊杆
图22:将4个吊点转换为2个吊点的起重结构
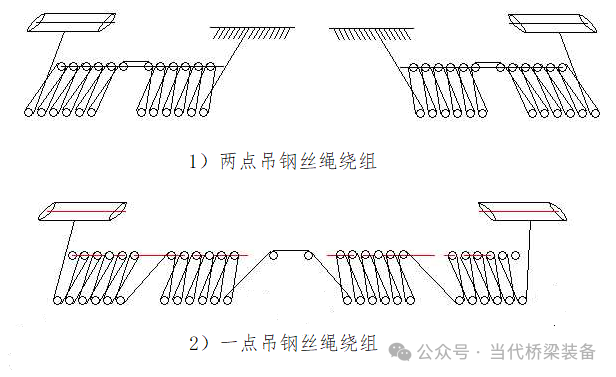
图23 钢丝绳缠绕示意图
3.6 液压控制系统
该运输架设机液压系统包括闭环驱动系统和转向、顶升、副腿顶升及卷扬提升系统等开环系统,采用恒功率负载传感+电液比例控制。
液压系统设有控制阀和限压阀,限制因液压油路油压过高而引起事故的发生,同时保证车辆起步、制动平稳,冲击小,稳定性好。
整机转速为无级调速,采用恒速控制原理,先确定柴油机的转速,然后调节泵、马达的排量,实现变速。
3.7 电气系统
电气系统主要由车辆电气系统和微电控系统两部分组成。
(1)车辆电气系统。车辆电气系统主要由电源系统和照明系统组成。电源系统由发电机、蓄电池、灯光、空调等组成。照明系统包括安装在远光灯挂点处的6盏照明灯。
(2)微电控系统。微电控系统由发动机控制系统、车辆速度控制系统、液压及其他电气控制组成。微电控系统采用基于CAN总线的分布式控制,采用芬兰进口的EPEC工程车专用控制器,具有CAN总线接口,防护等级达到IP67,可在振动、潮湿等工作环境下使用,可靠性高。
控制系统对整车发出操作指令,实时监控操作过程,当出现误操作时显示屏会给出警告和故障提示。司机室内显示屏采用进口CAN总线触摸屏液晶显示器,可显示起重量、起升速度、行驶速度、转向角度、转向方式、系统错误信息等。整个微电控系统包括起重机梁安全控制、转角控制、行驶控制、发动机及液压控制等。
整车还配备无线遥控器,控制行走、转向、抬梁等动作;遥控装置采用台湾裕鼎工业遥控器。
3.8 驾驶室
前车和后车各设一个司机室,人性化的司机室位于大车架上,配有可调座椅和空调,视野开阔。室内操纵盘上装有各种开关、手柄、按钮及上节介绍的微电控系统。在司机室内可进行紧急制动、报警等各种安全操作。
4 昆仑运输架设机的实际应用
4.1福厦高铁湄洲湾大桥铺架
在通过桥梁设计单元的桥梁安全审查以将光束运输到桥上之后,Kunlun集成的运输机和直立者成功地在2020年6月的Fuzhou-Xiamen高速铁路的Meizhou Bay Bridge上成功使用,请参见图24、25和26。

图24集成运输和勃起桥上昆伦的光束传输的实际照片

图25 Kunlun运输和勃起机的横梁整孔的实际照片

图26 Kunlun集成运输和勃起机器定位梁的实际照片
4.2 Kunlun的闭合式综合传输和勃起机束勃起和孔孔操作方法
4.2.1正常工作条件下的光束勃起步骤
所谓的正常工作条件是指在曲线,隧道和隧道入口和出口的情况下进行的光束勃起。
(1)转运桥机从横梁码头运送到桥头,前车辆悬架组抬高了125毫米,并且在此时支撑了桥梁的桥梁。
(2)桥架架设的机器被后车推动,并沿主支撑腿滚筒纵向移动到前码头(前车辆系统的裤子内的空间可以越过主支撑腿实体,请参见图17)。
(3)为了减少支撑剂的反作用力,必须将梁临时降低到桥甲板,支撑中间的支腿,并为腿部逆转操作做准备。
(4)中间支撑腿抬起300毫米,主支撑腿沿主梁的下部法兰向前移动到前码头以进行支撑。
(5)缩回中间的支架,并抬起PC盒子围栏,主要的支腿滚筒驱动桥梁架设机器,将PC盒子梁穿过孔。
(6)PC Box Girder穿过孔并放置在适当的位置,完成一个孔的勃起。
(7)桥梁射击机被缩回到其位置,主腿被缩回,桥梁射击机已经准备好返回到梁源以运输梁。
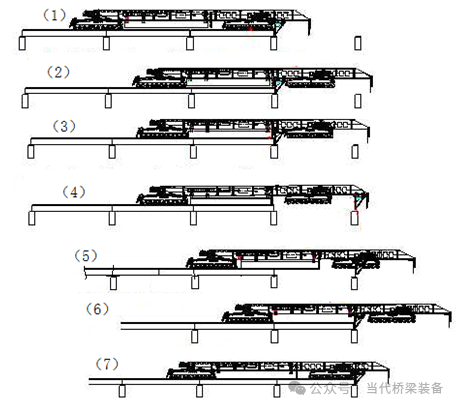
图27 Kunlun的运输和勃起机(闭合解决方案)正常光束勃起操作流程图
4.2.2曲线上光束勃起的原理和方法
对应于图28中的光束勃起原理图,曲线上的光束勃起和孔交叉操作的原理和方法(r≥2000m)的介绍如下:
以40m梁的连续架设为例,可以说明其余的跨度,并且可以通过类比来推导。
1)该桥梁架设机器的最小曲线半径为2000m。
如图28所示,直线ABC和AB'C'代表两个不同位置的桥梁架设的理论中心线,代表了后车辆的中心位置。 )如图28所示,它沿着直线A'B''C'向前移动。
3)基于图28中所示的状态(1),必须计算大悬臂的前点C与码头中心C'之间的距离,以确定桥孔上桥梁架设机的对齐操作:
图28所示的已知几何维度可以依次计算:
α1=89.208O,α2=88.625O,α3=α1-α2 =α2=0.583O,CC'=98cm可以推断,当桥梁架设的机器位于直线ABC位置时,距离大型cantilever deviate的前端c无法构成码头的前端c(几乎是1米)(几乎是1米)码头的顶部(请参阅图中的状态(2))。
4)为桥接机器选择合理且可行的梁射击方向:
假设直线A'b''c''是桥架勃起机的实际横梁勃起操作位置,请让:
cc''=78厘米,然后C''C'=20cm(可以接受)。
5)桥架架设机器对齐的特定操作:
当桥梁勃起机器将光束传输到图28中的状态(1)时,抬起后车辆的圆柱体将轮胎转动为90度,并且在此时,将圆柱体缩回吊装用平衡梁计算软件,后车辆由射击射击。在水平垫梁(带有水平运动机构)上安装了点B,将其抬起以携带力,并且主要的支架被卸载。 可以沿着直线A'B''C''方向纵向移动桥梁勃起机,向图28所示的状态(2)移动。
6)特定的光束勃起操作:
前吊架手推车束向曲线的内部移动19厘米,后悬挂式手推车束向曲线的外部移动19厘米,然后将光束掉落。
从上面可以看出,曲线上桥梁的横梁射击操作是一种关键的构造技术,也是构造难度。
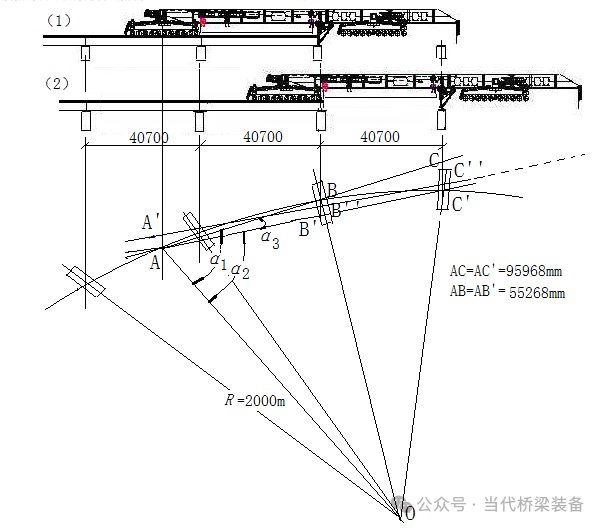
图28 Kunlun集成机器在曲线上竖立光束的示意图
4.2.1在隧道入口和出口处建立梁的方法
Kunlun Transporter和Erator可以通过隧道自由地携带梁,在隧道中竖立梁(熔化的隧道桥),并在隧道的入口和出口处竖立梁,由于空间限制吊装用平衡梁计算软件,本文仅提供标准的勃起束的勃起状态,如图29所示。
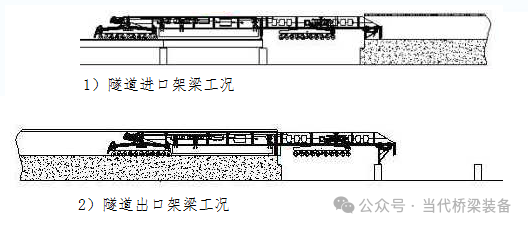
图29隧道入口处的Kunlun集成机和出口梁勃起状态
5 结论
成功开发的高速导轨1000T/40m的上导梁kunlun运输和勃起集成机的几个主要功能总结如下:
1.它是最大的吨位和最大的吨位双轨,仅支持中国高速铁路的桥梁桥梁(PC盒子)。以及我国高速铁路的勃起桥梁。
2.它采用了一种灵活的工作机制,可以在开放类型和封闭类型之间切换,以及整个机器的整体结构方案。
当光束传输的距离短时,道路环境和空间宽而平坦,可以选择封闭的工作机构,否则可以选择开放和关闭的工作机构,这解决了许多由长身,太长的悬臂和太大的吨位引起的问题。
3. It solves the bottleneck problem of erecting 40m span PC box girders in high-speed railways in mountainous areas with dense tunnels and bridge-tunnel connections, because it can not only carry 1000t/40m box girders freely through high-speed railway 250km/h and 350km/h tunnels with curves R≥2000m, but also can erect PC box girders in tunnels and at tunnel entrances and exits.
总而言之,该机器已经实现了初步研究阶段设定的战略目标,并且可以促进和应用。
参考
[1]黄Yaoyi,Liu Peiyong,Du Laisi等。
[2] Wang Jinxiang,Huang Yaoyi,Dong Xiulin等。
3]王Zhiyong,Zhao Jingyi,Huang Yaoyi等。
[] Yayi,Wang Jinxiang,Xing Haijun等人的总体结构设计。
[] Yayi。
[6]黄Yaoyi。
※本文所描述的项目由:1)中国国家铁路集团有限公司,2016年关键科学与技术发展计划项目(2016G002-G); 2)中国铁路建筑公司2018年主要设备开发计划项目(18A-04);
Yaoyi,男性,来自北北省Huikhou区的Shuikou。设计学院,西南吉腾大学的研究生主管,中国钢结构协会主任,中国铁路协会的高级成员。
He has been engaged in the research and design of large-scale special equipment for a long time, including: the research and development of military bridges, standard equipment for emergency bridge repairs on highways and railways, and complete sets of equipment and technologies such as large-tonnage bridge-building machines for high-speed railways, tire-type beam transporters, and tire-type beam-lifting machines.
他被北京市政府和北京政府授予了科学和技术明星的头衔,并在他的早期获得了许多成就,并获得了许多成就,例如国家科学和技术进度奖,例如《铁路Zhan Tianyou Achiev Achiev and Ploys Plance of Special Command of Special Interance of Special of Special of Special of Special of Special of Special of Special of Special of Special of Special of Special of Special of Sepredance》。 (科学与技术研究)计划 - 桥梁铺设技术研究并完成设备开发,并成功完成了任务。
