随着以太网技术在汽车领域的广泛应用,基于以太网(DoIP,Diagnostic Communication Over Internet Protocol)的车辆刷机已经不再是新鲜事。然而,当该技术投入开发时,总有许多细节值得我们考虑和注意。本文将谈谈基于以太网的软件刷机的 QA。
Q1:应用程序请求更新的TCP连接等待时间与普通冷启动的等待时间相同吗?
A1: 一般是不一样的。为了大家更容易理解这个问题,我们先对此进行扩展。芯片内含有用户的Bootloader程序和用户的Application程序。当Application需要更新时,Application可以先将一个标志(如:ProgSignature)写入一个共享内存区域(Shared Memory)。之后程序进入Bootloader,读取Bootloader中的标志,然后判断Application是否有更新请求,如下图所示:
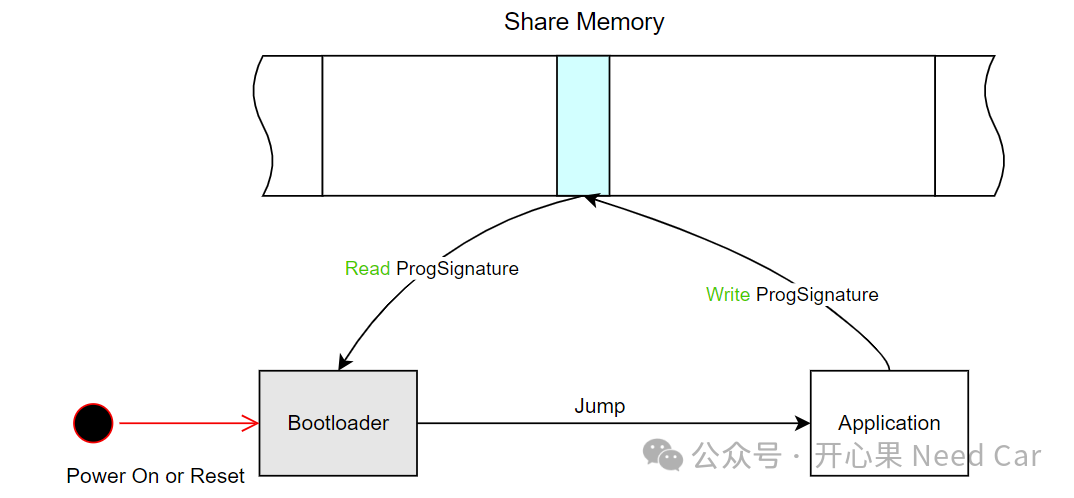
如上图所示,当程序在Bootloader中,在进入Application之前,需要进行Application更新请求判断。如果有请求,程序就停留在Bootloader中,等待诊断指令更新Application。因为是基于DoIP刷机,所以建立TCP连接是前提(这里假设TCP连接时间为T_EstablishTCPConnection#1);如果没有更新Application的请求,也必须建立TCP连接(这里假设TCP连接时间为T_EstablishTCPConnection#2),以便在诊断接收窗口期(Timeout_Prog,eg:5ms/20ms)内可以接收到诊断指令。这一步主要是为了防止控制器变砖。示意图如下:
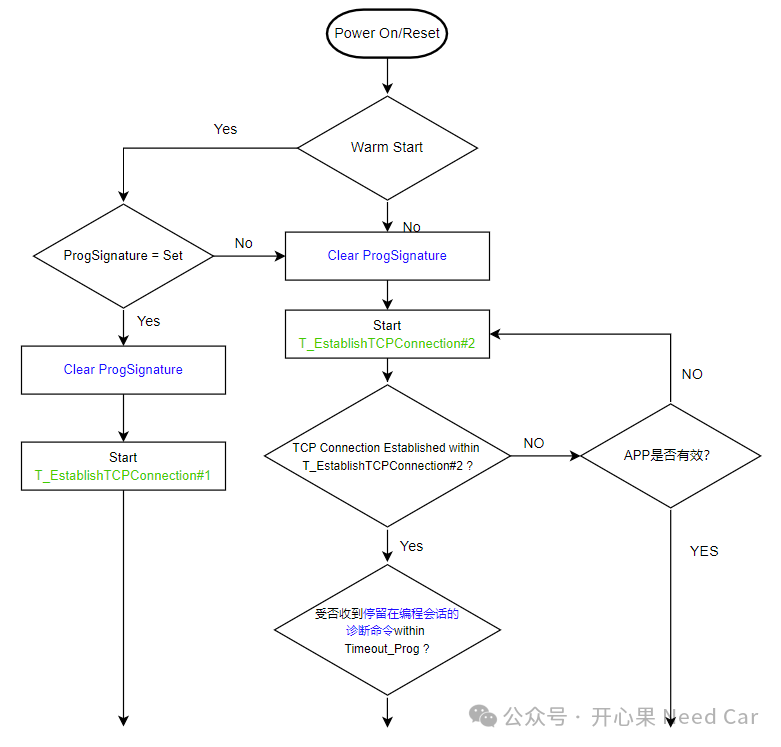
那么,问题来了:T_EstablishTCPConnection#1和T_EstablishTCPConnection#2是同一个时间吗?如果Application不需要更新,即没有设置ProgSignature(No Set),应该尽快建立以太网通信连接(eg:T_EstablishTCPConnection#2 = 1s)。如果Application有更新请求,即设置了ProgSignature(Set),为了保证后续刷机,其以太网通信连接时间是可以容忍的(eg:T_EstablishTCPConnection#1=30s)。注意:上面的1s或者30s是指TCP建立连接的最大等待时间,对于实时性要求严格的MCU级芯片,实际的TCP连接时间不会这么长。
Q2:哪个节点首先发起 TCP 连接?
A2:要回答这个问题,首先我们要了解车辆的以太网网络拓扑结构。车辆的以太网拓扑结构如下图所示:
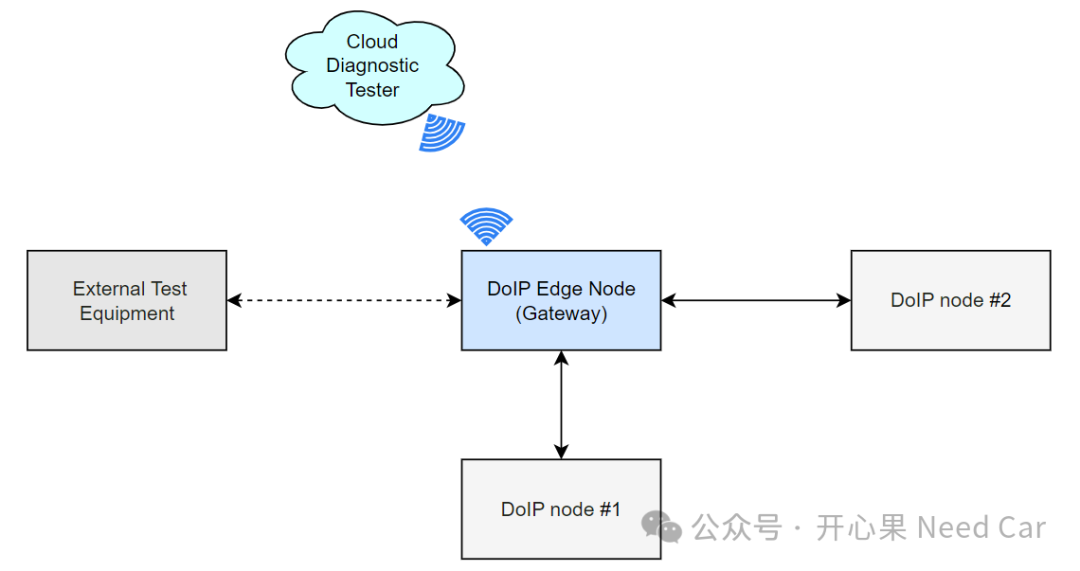
如上图所示,基于DoIP的诊断一般包含以下几个角色:外部测试设备、云端(Cloud Diagnostic Tester)、边缘节点(DoIP Edge Node)、以太网终端节点(DoIP node)。
由于每个人扮演的角色不同,功能上也会有一些差异,了解了基于DoIP的以太网拓扑结构之后,我们再回到问题:谁来主动发起TCP连接?
一般来说,DoIP 节点作为以太网的终端节点,会是 TCP 连接的客户端,也是 DoIP 的服务端。由于以太网的终端节点需要和边缘节点通信,或者让边缘节点转发以太网消息,所以边缘节点不仅会充当交换机的角色,还需要作为 TCP 的服务端。所以,问题有了答案:当 DoIP 节点和 DoIP Edge Node 进行 TCP 诊断通信时,DoIP 节点会主动发起 TCP 连接(特别是当 DoIPnode 进入编程会话时)。结合 Q1 中的 T_EstablishTCPConnection 时间,我们可以了解到,每次 DoIP 节点(TCP Client)复位或者冷启动时,都需要主动发送 TCP 请求。
在DoIP Node与DoIP Edge Node之间建立TCP连接时,需要注意以下几点:
Q3:S3Server何时启动/停止?
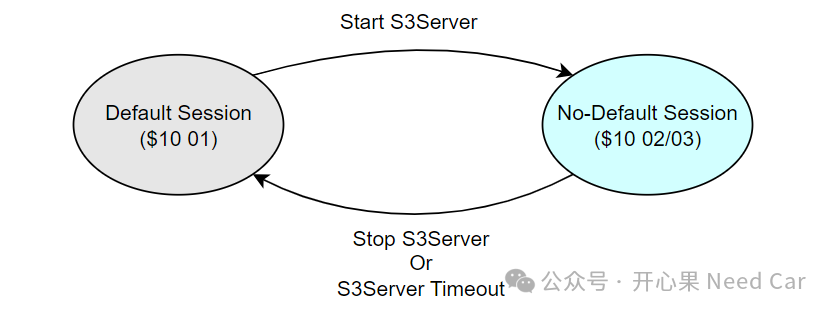
A3:首先明确一下S3Server的定义,S3Server时间是指服务器在收到诊断命令请求后刷ip软件,保持在非默认会话的时长(例如:5s)。S3Server启动/重置和会话的关系如下:
如果DoIP Node A初始化完成,DoIPNode B会先启动S3Server时间。如果DoIPNode B未初始化或者初始化时间太慢,DoIPNode A的S3Server时间会超时并退出非默认会话刷ip软件,影响后续诊断。因此,进入非默认会话后,S3Server启动时间需要等到客户端与服务端完成DoIP连接。
Q4:为什么需要在Bootloader中发送网络管理消息?
A4: 在一些OEM需求中,大家有没有注意到Bootloader开发者需要在Bootloader中周期性(例如:500ms±10%)发送网络管理消息(例如:0x53F)?这是为什么呢?我们知道在Bootloader中,一般是不需要网络管理的,网络管理一般都是在Application中使用。
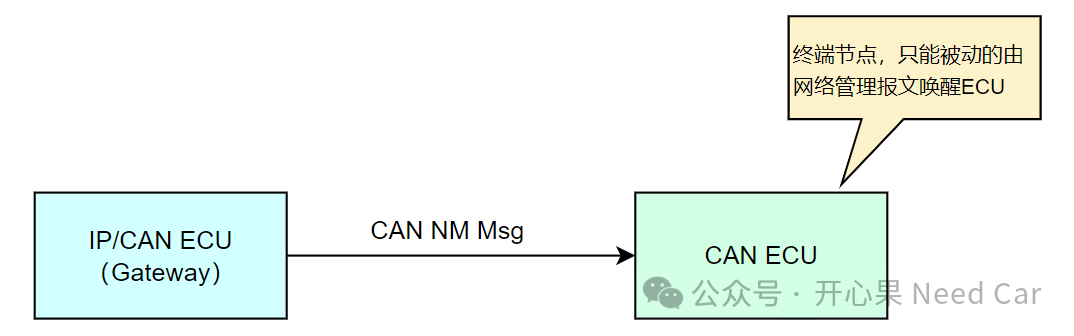
例如支持以太网和CAN的ECU节点与子节点CAN ECU的诊断需要通过CAN消息交互,而CAN ECU的唤醒方式只能是被动接收CAN NM Msg。如果IP/CAN ECU在启动进入Bootloader后,不向CAN ECU发送CAN网管消息,那么就无法唤醒CAN ECU,无法与IP/CAN ECU建立通信。所以,这也是为什么需要在Bootloader中发送CAN NM Msg的原因。示意图如下:
同时考虑到CAN ECU可能支持PNC(Partial Network Cluster)网络管理,因此在发送CAN NM Msg时,可以设置所有的User Data,例如:0x3F 0x40 0xFF 0xFF0xFF0xFF0xFF0xFF。
过去的亮点
点击下方关注,一起聊聊Autosar/Embedded,有需要可以联系作者入群,给你更多专业解答。
