自动驾驶带来了深远的好处:提高燃油效率、缩短行程时间、改善乘客体验和生产力、为无法驾驶的老年人和残疾人提供驾驶自由,最重要的是,提高道路安全。
由于技术复杂性、商业可行性和监管挑战,自动驾驶汽车成为主流所需的时间一再被推迟。对于何时、如何实现自动驾驶,特别是自动驾驶的商业场景落地,业界尚未形成统一的看法。对于自动驾驶产业链各家企业来说,汽车智能化仍然是一个长远的未来。灰色时期与黑暗时刻并存。
汽车产业革命上半场电动化、下半场智能化已成为行业共识。然而让人意想不到的是,半场的切换来得这么突然。一片新的疆域也在这场跨界探索中缓缓展开,为汽车行业带来新鲜空气,但也涉及泥沙。对于参赛者来说,在商业成功的路上,他们陷入了一些误解和陷阱。
01
计算能力无法使自动驾驶成为可能
业界需要思考的一个问题是:在“软件定义汽车”的情况下,是否只能通过算力的堆叠来解决智能驾驶系统的计算平台的支撑问题?
笔者认为,改进硬件固然重要,但决不能陷入“仅算力论”的恶性循环。
决定计算能力真实值的最重要因素是内存带宽、实际运行频率(即电源电压或温度)以及算法的批量大小。
为什么会发生这种情况?这就涉及到MAC计算效率的问题。
如果你的算法或者CNN卷积需要1TOPS的算力,而计算平台的算力是4TOPS,那么利用效率只有25%。计算单元大部分时间都在等待数据传输,尤其是当批量较小时。 ,那么存储带宽不足会严重限制性能。
但如果超过平台的计算能力,延迟就会大幅增加,存储瓶颈也将是致命的。
当效率为90-95%时,存储瓶颈的影响最小et软件突然带不开,但这并不意味着不会产生影响,而且影响仍然存在。
但平台不会只运行一种算法,计算利用效率很难稳定在90-95%。
这就是大多数人工智能算法公司想要定制或制作自己的计算平台的主要原因,而计算平台制造商也需要推出配套算法。
自动驾驶芯片的竞争壁垒在于算力利用率和可用性。算力不能说无限增长,芯片PPA(功耗、成本、面积)非常关键。对于车载AI芯片来说,算力指标很重要,能效比更重要。
以Nvidia的芯片为例,其GPU的功耗是最高的。奥林和泽维尔的利用率基本都是30%。不管怎么优化,基本都是30%。
与Nvidia的GPU方案不同,高通、Mobileye、华为等国内初创公司都走ASIC路线。
ASIC芯片针对不同的神经网络模型进行了优化,基本上可以达到60%到80%之间。更好的可能达到80%或更高。
芯片算力和嵌入式硬件的无限扩展不会是未来的趋势。另外,车企面对的消费端是否立即需要如此高端的算力?未必。
自动驾驶算力主要体现在感知层面的融合。对于L3,100~200就足够了。对于L4,可能需要200~300。更重要的是如何利用计算能力。并不是说越多越好,如果要做1000个,其实也没有必要,而且高算力背后的高功耗、低利用率的问题越来越严重。
02
算力竞争的终结:事件相机
如今自动驾驶领域使用的视觉识别算法基本上都是基于卷积神经网络。视觉算法的运算本质上是卷积运算。
这种计算并不复杂。本质上只涉及加、减、乘、除,是一种乘法、累加和累加运算。然而,这种简单的运算在卷积神经网络中大量存在,这对处理器的性能提出了很高的要求。
以ResNet-152为例。这是一个 152 层的卷积神经网络。处理224*224尺寸的图像所需的计算量约为226亿次。如果这个网络需要处理1080P 30帧图像的相机来说,所需的计算能力高达每秒33万亿次,这是非常巨大的。
事实上,自动驾驶领域99%的视觉数据在AI处理中都是无用的背景。
这就像检测幽灵探测器一样。变化的区域是很小的一部分,但是传统的视觉处理仍然要处理99%的没有变化的背景区域。这不仅浪费了大量的计算能力,而且还浪费时间。
或者如果砾石里有钻石,AI芯片和传统摄像头需要识别每一粒沙子并过滤掉钻石,但人类只需看就能检测到钻石。 AI芯片和传统相机比人类花费的时间多100倍或1000倍。
事件相机的工作机制是,当某个像素的亮度变化到某个阈值时,相机会返回上述格式的事件,其中前两项是事件的像素坐标,第三项是事件的像素坐标是事件的发生。时间戳,最后一项是极性0, 1(或-1, 1),代表亮度是从低到高还是从高到低。它通常也被称为积极或消极事件。称为开或关事件。
这样,在整个相机视野范围内,只要像素值有变化,就会返回一个事件。所有这些事件都是异步发生的(无论时间间隔有多小,它们都不可能完全同时发生),因此事件的时间戳都是相同的。不会,因为回传简单,与传统摄像头相比延迟较低,可以捕捉短时间内间隔内的像素变化。延迟是微秒级的。
事件摄像机的灵感来自于人眼和动物的视觉,也称为硅视网膜。生物视觉只对发生变化的区域敏感。例如,如果一个物体突然落在眼前,人眼就会忽略背景而聚焦于该物体。事件相机捕捉事件或变化的发生。
在传统的视觉领域中,摄像头传回的信息是同步的。所谓同步,就是在某个时刻t,相机进行曝光,将此时的所有像素填入一个矩阵中并发回,一张照片就诞生了。 。照片中的所有像素都对应于同一时刻。
至于视频,它只是许多帧的图片。相邻图片之间的时间间隔可大可小。这就是我们常说的帧率(frame rates),也叫时间延迟(time Latency)。
事件摄像机类似于人的大脑和眼睛,跳过不相关的背景,直接感知场景的核心,创建纯粹的事件而不是数据。
除了减少冗余信息和几乎无延迟的优点外,事件相机的优点还在于,由于延迟低,传统相机在拍摄高速物体时(由于曝光时间)会出现模糊,而事件相机几乎不会不是。
然后是真正的高动态范围。由于事件相机的特性,传统相机在光线强度强或弱(高曝光和低曝光)的环境下会“失明”,但像素变化仍然存在,所以事件相机仍然能够清楚地看到前方的东西我。
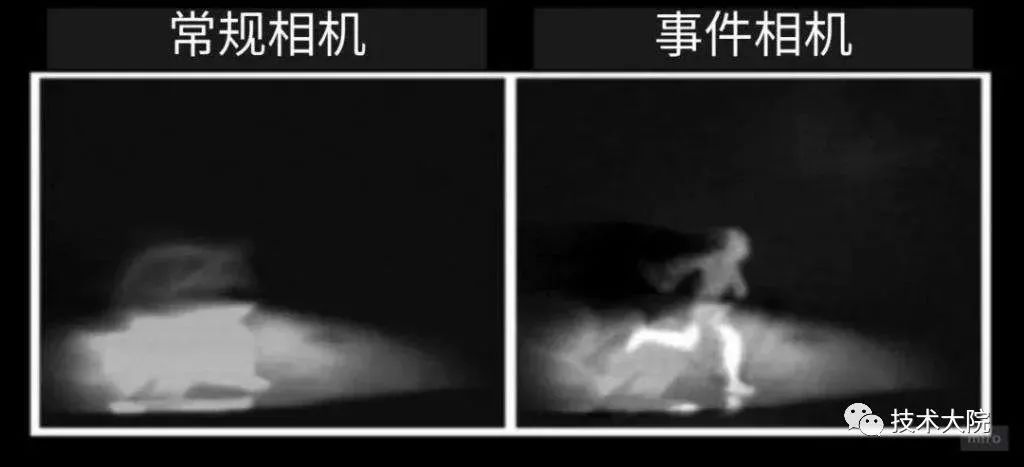
传统相机的动态范围无法扩大,因为放大器具有线性范围。如果照顾低照度,就无法适应强光。相反,如果适应强光,就无法兼顾低照度。
事件相机在目标跟踪、动作识别等领域具有压倒性的优势et软件突然带不开,特别适合自动驾驶。
向空中扔一个球,看两个摄像头的轨迹记录:
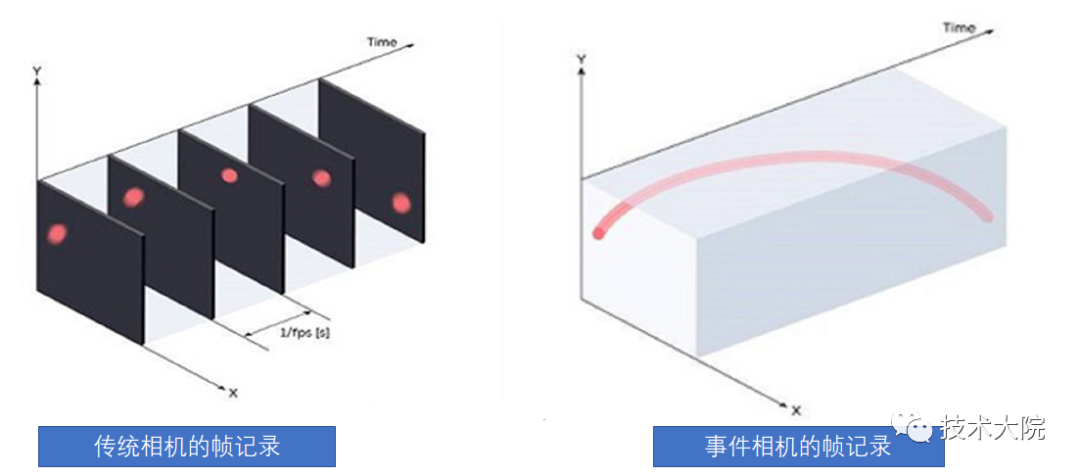
事件相机的出现对于高算力AI芯片来说是致命的打击。只需传统高算力AI芯片1%甚至0.1%的算力即可完美工作,功耗为毫瓦级。事件摄像机根据管道时间戳处理数据,而不是逐帧处理单个像素。
传统的卷积算法可能没有用处,AI芯片最擅长的乘法、累加运算也可能没有用处。为了准确检测行人并预测其路径,需要多帧处理,至少10帧,也就是330毫秒。这意味着相关系统可能需要数百毫秒才能实现有效检测。对于时速60公里的车辆来说,行驶5.61米需要330毫秒,而事件相机理论上只需要不超过1毫秒。 。
03
车路协同是伪命题
自动驾驶的技术路线大致分为两种:
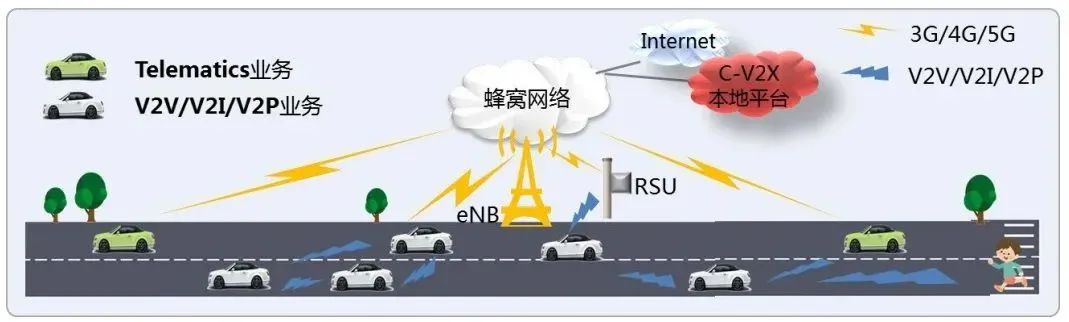
与自行车智能不同,车路协同追求的是通过车辆与周围事物的互联来实现自动驾驶。再加上现在非常火热的5G概念(更快的峰值网络传输速率可以让通信更快),通过车路协同的自动驾驶似乎更有前景。然而,现实似乎并非如此。
首先,交通运输系统的属性发生了变化。车路协同凸显了传统交通系统中不易看到的车辆自组织、网络化、非线性、强耦合、泛随机、异构粒度等特性。因此,传统的交通流研究方法不再适用。
其次,交通的组织成分发生了变化。随着车路协同的发展,车联网的出现,而随着自动驾驶的引入,在自动驾驶汽车和人类驾驶汽车长期共存的场景下,所需的模型将变得更加复杂。
再次是交通系统的边界问题。从交通结构来看,没有主次之分,也没有统一的目标。只要有人的地方,就有交通系统。因此,交通系统将被视为一个开放的、复杂的系统。
从车企的角度来看,自行车智能化显然更为重要。车路协同短期内普及的可能性不大。作为汽车产品,既要销往国内,又要销往国外,既要满足城市道路,又要满足农村道路的需求。过度依赖车路协同无疑是一种自我约束。
从高速公路车路协同系统的角度来看,感知层面主要分为车侧感知和路侧感知两类。路端感知一般采用摄像头、毫米波雷达、激光雷达以及各种环境传感器来采集信息,同时还有红绿灯、交通标志等交通设施辅助;车载端还需要一定的协同设备来接收相关信息;并采用4G、5G、有线光纤等进行通信;此外,还需要一个管控平台,通过部署在车端、路端、云端的计算平台,进行复杂的系统信息融合和数据分析。
从感性的角度来看,智慧道路只有范围足够大,才能真正实现协同。但目前的现状是车路协同覆盖范围有限,路侧设备集成度不高。
目前路边监控设备主要采用摄像头,但在最需要信息的时候,比如极端天气(大雨、大雾等),摄像头可能无法提供信息。如果改用激光雷达,虽然可靠性提高了,但成本高,寿命有限。路边激光雷达的寿命不超过1年。
NR-V2X关键技术仍需验证、带宽需求需要研究、频谱规划需要确定。这些问题仍然是车路协同实施的障碍。此外,尽管很多地方都有智慧高速公路,可以收集大量数据,但仍然面临着不知道如何处理数据的问题,而且路端传感器如何布置也没有统一标准。
04
车路协同商业模式行不通
据《2020年交通运输业发展统计公报》显示,截至2020年底,全国公路总里程519.81万公里,其中四级及以上公路494.45万公里,二级公路70.24万公里和高速公路上方。国道里程37.07万公里,省道里程38.27万公里。农村公路里程438.23万公里,其中县道66.14万公里,乡村公路123.85万公里,村道248.24万公里。
考虑到农村道路往往限速较低、车流稀疏,除交叉路口外,无需配置车路协同感知系统。只能优先考虑二级及以上高速公路或国省干线,总里程约70万公里。如果按照高速公路标准铺设传感系统,每100米配置1个点,同时考虑弯道、隧道等特殊情况(大部分国省干线只能单侧传感),那么每公里投资约50万,则国省干线公路传感网建设成本约3500亿。
从商业运营角度看,车路协同是虚假需求,在商业模式上行不通。一公里改造费用为6亿元。政府可以出这个钱,但是如果走这条路,我们不能要求主机厂安装一个2000-3000元的OBU。
所谓车路协同,每辆车增加政府基础设施成本2000-3000元。修这条路,车路协同的设备一旦建成就完成了,但是没有人跟。
以上海开放道路测试区为例,73公里范围内部署了182个路侧单元,平均每公里2.5个单元。这只是一个示范区。如果部署整条智慧道路,成本不会低。

国家智能网联汽车(上海)试点示范区-开放道路试验区
我们一直说5G支持的车路协同会创造更大的价值,但我们有没有想过5G的落地有多难?
5G虽然速度快,但辐射范围很小。要达到相同的辐射范围,5G基站至少必须是4G的2-3倍。
而且建设成本也不低。一个5G基站大约需要50万-60万(至少),而且5G基站的功耗非常高。此前曾有新闻报道称,洛阳联通在夜间休眠部分5G基站,以降低电费。中国铁塔数据显示,单个5G基站单个租户每年综合电费约为2.3万-3万元/年。
对于5G V2X来说,需要大规模覆盖才能真正发挥车路协同的作用。因此,5G-V2X的实际推广比想象的困难得多。
05
垄断与数据安全:车联网正在互联网化
车路协同热潮出现在2018年。这一年,各大互联网公司动作频频,将幕后默默无闻的车路协同推到了风口浪尖。
今年,时任百度智能驾驶事业群总经理的李振宇在媒体沟通会上宣布,将正式开源Apollo车路协同解决方案,并向行业开放百度Apollo的技术和服务。
同年9月的云栖大会上,阿里巴巴成立了“2038超级联盟”,汇聚了交通运输部公路研究院、国家电网、中国联通、一汽集团、英特尔、福特汽车等各方力量建设智慧高速公路。但阿里巴巴的车路协同是建立在自己的封闭体系下的。
在阿里巴巴的实践中,阿里云负责搭建云控制平台,为车路协同场景提供整体控制能力; AliOS构建车路云协同计算系统,完成车路协同的具体能力;达摩院负责开发路测感知硬件,需要安装。同时高德地图、千寻等提供高精度地图,支付宝解决高速支付场景。此外,菜鸟联盟和ET城市大脑的场景支持阿里在自己的生态系统内建立的“封闭式”车路协同生态足以显示他的野心。
一直持观望态度的腾讯,却姗姗来迟。它仍然采用平台化的轻运营模式,将自己定位为车与路之间的连接器。自行车智能、道路智能实现后,我们将依托腾讯平台的大数据支持,向C端发展。
与BAT一同出席的还有华为,在最初的智能汽车领域,华为更倾向于扮演通信运营商的角色。基于自身ICT技术,华为早年的布局多是在车路协同的基础设施建设和提供智能硬件产品上。
但2018年底,BAT也开始销售解决方案和软件,推出“TrafficGo1.0”对标阿里巴巴的城市大脑、百度的ACE智能交通引擎、腾讯的“We Transport”。
如果把车路协同比作丛林探险,车路协同企业应该分为五个阵营:
以BAT为代表的互联网科技公司;以华为为代表的ICT企业;以及汽车供应商、车路协同解决方案提供商和汽车整车厂(主要是福特)。
同一阵营中,各大厂商也都在根据自己的优势选择相应的道路,而道路的尽头则是丰厚的奖励。
据统计,目前我国汽车保有量为3.8亿辆。其中,智能网联汽车数量快速增长。预计到2022年,智能网联汽车保有量将突破7800万辆。
虽然基数巨大,但数据产生的速度也相当快。随着传感技术、自动驾驶技术等的不断成熟,未来智能网联汽车中智能网联汽车、智能驾驶等每天产生的新数据可能要以TB级计算。
海量数据并非全部有效,但经过筛选和处理后,会产生巨大的利用价值。用好数据自然会成为未来智能驾驶的“蜜”,但令人担忧的是,随着资本的介入,“蜜”变成了“砒霜”,数据的正确利用可能会逐渐变成“砒霜”。挪用、滥用,甚至可能成为资本搜寻信息、进一步增值的工具。
近年来,随着整车相关服务及后市场商业模式的发展,商业模式逐渐升级和丰富:
数据变现:车联网带来了丰富的车辆和道路数据,开辟了数据变现的新方向。
通过收集用户的驾驶数据,可以实现更准确的保险定价,从而帮助保险公司准确衡量风险。
二手车交易、汽车贷款等也可以成为数据变现的潜在模式
广告流量:车联网设备可以占用一定的用户使用时间,从而获得一定的流量。这些流量可以通过展示广告来货币化。此外,还可以将流量引导至与车主相关的服务,例如汽车美容等。
在乘用车市场,V2N场景下的广播、地图导航等辅助驾驶APP等商业产品逐渐成熟。许多与汽车相关的服务和后市场服务,如网约车、保险、汽车美容、二手车等也因移动互联网的快速发展而蓬勃发展。
那么问题来了,随着车联网市场不断发展,百花齐放是否会变成寡头垄断?
2021年2月,博泰车联网举报腾讯垄断,打响车联网反垄断第一枪,但至今仍未有实质性结论。
博泰与上汽通用五菱就腾讯涉嫌垄断问题联合向国家市场监督管理总局反垄断局提交了反垄断报告。
随着V2X的兴起,整车厂原有的汽车行业主导地位受到了挑战。由于缺乏互联网等跨界技术积累,他们不得不与互联网、科技公司合作。然而,在竞争中,主机厂也在不断部署新技术,试图继续主导汽车智能化进程。
随着行业竞争日趋激烈,车企、科技公司、互联网巨头之间的技术竞争已升级为话语权争夺战。它已经从几年前的暗流发展到现在的诉讼。
这些汽车行业的“闯入者”正在以智能化的趋势改变汽车的属性,试图让传统汽车的世界不再乏味,而是充满无限可能。与此同时,变革者也带来了互联网的诸多不良基因,其中最突出的就是数据垄断和信息安全。互联网时代踩下的霹雳,也可能彻底改变车联网的生活。
06
写在最后
今天的人工智能本质上仍然是暴力计算,依赖于海量数据和海量计算能力。对数据集和计算能力的需求不断增加,这显然离初衷越来越远。
文明的每一次进步都会带来效率的巨大提高。只有效率的提高才是进步。然而,依赖海量数据和海量计算能力的人工智能却恰恰相反。效率越来越低。事件相机是正确的方向。 。
自动驾驶、自行车智能或车路协同的未来?
从技术角度来看,一个更现实的问题是车路协同并不是在所有领域都能实现。例如,在农村地区,铺设大量智能基础设施来支撑车路协同,显然是不经济的。此外,国外是否会接受这条路线并大规模铺设相关基础设施也存在很大的不确定性。
对于汽车制造商来说,他们开发的汽车显然不能只适合特定领域——除非他们是专门开发特定用途汽车的公司。而是要同时满足城市、农村、国内、国外等多个不同市场的需求。在这种情况下,将自行车放置在智能路线上显然更合适。
从商业模式来看,车路协同的成本很高,有数百亿甚至上千亿。投入这样的资金只能实现高速公路和省道的自动驾驶,实在是得不偿失。而且建成后后期的维护和运营成本巨大,难以持续。
车路协同更多的是解决路权分配问题。只需要将大数据流量与车辆连接起来即可。没必要搞得这么复杂。重点还是依赖于车载端。
自行车智能还远未达到顶峰。在物理规则内,我相信目前没有什么是自行车智能无法克服的,必须通过V2X来解决。
对于自动驾驶甚至无人驾驶来说,车路协同是锦上添花,自行车智能化是必由之路。
作者:科技大院 简介:传播知识、开阔视野、知识渊博、趣味横生、信息丰富。
