作者 徐丽思
编辑莫莹
《机器人展望》12月19日报道,今天,普渡机器人发布了首款全尺寸双足人形机器人PUDU D9。
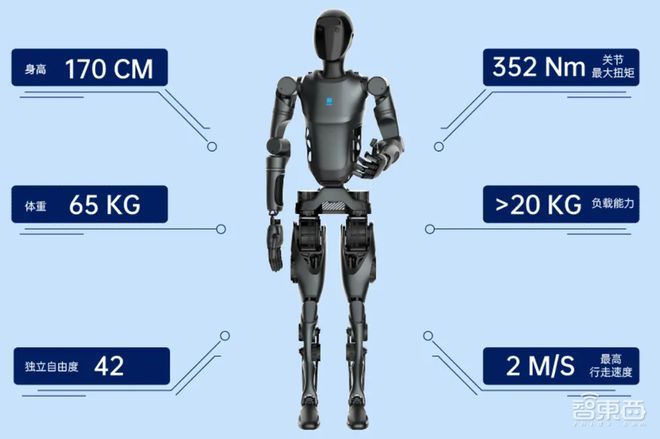
PUDU D9身高170厘米,体重65公斤。其车身关节拥有42个自由度,最大关节扭矩达到352Nm。它搭载了此前发布的五指灵巧手PUDU DH11,具有高度拟人的双足行走和双手操作能力。
据了解,PUDU D9是由Pudu X-Lab开发。这是继人形机器人PUDU D7、灵巧手PUDU DH11之后,团队今年孵化的第三款产品。
PUDU D7是普渡机器人今年9月发布的首款人形机器人。它具有人形结构,30自由度,底部有移动底盘。 PUDU DH11是普渡机器人今年10月推出的一款11自由度五指灵巧手。它配备了12个触觉传感器区域,单指最大握力为30N。
新发布的PUDU D9体现了三大亮点:
首先,在行走方面,PUDU D9可以以接近成人的速度行走,最高可达2m/s。它支持楼梯、斜坡、崎岖道路等多种常见的城市地形,并通过算法实现站立、行走、跑步等无缝运动。缝开关。
演示视频中,PUDU D9在行走时表现出了良好的抗干扰性和平衡性,面对踢腿也能平稳前进:
PUDU D9还展示了如何顺利走上斜坡:
此外,PUDU D9还可以通过高精度传感器综合获取周围几何和语义感知信息,实时构建3D语义图,从而准确定位自身与环境的姿态关系,并根据任务自主规划路线,实现灵活通行和实时避障。 。
其次,在操作方面,PUDU D9拥有两个7自由度机械臂,负载超过20kg。搭载11自由度五指灵巧手PUDU DH11,可灵活完成各种精准操作任务,满足各种场景需求。
演示视频中,PUDU D9可以灵巧的双手操作洗地机来清洁地板:

第三,在交互方面,PUDU D9配备了高精度的视觉、触觉、力、听觉传感器,可以获取真实环境的多模态信息,并通过“大脑+小脑处理”进行反馈。大模型下,PUDU D9可以实现贴近真人的多模态自然人机交互,更好地为人们提供服务。
例如,当PUDU D9通过视觉传感器检测到地面有明显污垢时,就会控制洗地机根据污垢的形状调整清洁方向:

根据普渡机器人的产品进度,目前已完成专用型、类人型、类人型三类机器人的完整产品布局。产品布局完成后,普渡或将在具身智能领域发力。通过探索机器人A1运动、操作三大基础能力的技术创新,可以让仿人机器人在更多的实际场景中得到展示。价值。
