随着嵌入式微处理器、传感器、导航、通信、电力供能、控制理论等技术的发展,研究开发具有广阔军用和民用前景的串联式无人直升机具有重要的现实意义[1-5]。 设计和建造串联式无人直升机原型机,并研发串联式无人直升机飞行控制系统是深入研究该模型的必要条件[6-7]。 串联式无人直升机的主要优点两对导管同步向相反方向旋转,相互抵消导管形成的反作用力矩,因此所有动力均可用于导管的旋转形成升力[8- 9]。 同时,由于这些布局的直升机没有尾部螺旋桨,因此可以省掉尾翼。 螺旋桨消耗的功率约占总功率的7%~10%。 悬停时的气动效率低于传统的单导管布局[10-11]。 此外上位机软件调试程序,这种布局的直升机的机身质量接近于单导管布局的直升机。 同时作为直升机,它拥有更大的螺旋桨盘面积,可以实现更大的起飞质量。 相同起飞质量下,其运载体积更小,安全性优于单导管无人直升机。 同时,由于串联式无人直升机的结构相对对称,比单导管直升机简单。 易于模块化设计,方便维护,降低使用成本[12]。
与多涵道无人机和尾浆单涵道直升机相比,串联式无人直升机具有载重量更大、续航时间更长等独特优势。 目前,串联式无人直升机还没有具体计划。 直升机飞控开源需要对串联无人直升机飞控系统进行深入研发和飞行试验。 本文涵盖了串联式无人直升机的飞行控制原理、硬件设计、软件开发和系统调试。 从试飞、试飞等几个方面对所搭建的飞行控制系统进行了详细的讨论。 最后,通过遥控飞行试验对所设计的飞行控制系统进行了验证。
1 串联式无人直升机运动控制设计 1.1 串联式无人直升机总体结构参数
电动无人直升机采用由电机、电池和电子调速器组成的电力系统作为动力。 与传统内燃机驱动的直升机相比,具有低噪音、低振动、清洁无污染、好维护、可靠性高等特点。 文中设计的串联式无人直升机采用无刷电机驱动,机械结构简单、控制灵敏、噪音低。 设计的三维模型如图1所示。

图1 串联式无人直升机三维模型
这架串联无人直升机由 2 个无刷电机提供动力,并具有 6 个数字襟翼。 前后管道下方各安装 3 个数字翻板。 控制前后手动倾斜器,实现前后风道总距变化。 横向循环音调变化和横向循环音调变化。 建成的串联式无人直升机样机如图2所示。

图2 串联式无人直升机原型机
本文搭建的串联式无人直升机样机总体参数如下:质量3.0kg; 最大起飞质量5.5kg; 机身厚度1650mm; 机身高度245mm; 螺旋桨盘直径405mm; 刀片宽度360mm; 刀片弧长34mm; 叶片数量为6片; 电机功率1250×2W; 电池电流22.2V,容量2200×2mAh。
1.2 串联无人直升机运动控制分析
串联式无人直升机完成飞行控制必须具备的基本条件是有效控制飞机的横滚、俯仰、航向和高度[13]。 串联式无人直升机利用2个无刷电机的怠速和6个数字襟翼输出角度控制前后两个手动倾斜器的状态,使无人直升机形成垂直、纵向、横向和偏航运动。
垂直向下运动是通过同等降低和减少前后管道的总距离来实现的上位机软件调试程序,如图3a所示。 变桨控制是通过前后风道拉力的差值变化,即通过前后风道来实现的。 ,实现了后风道的差分集体节距或差分横向循环节距,如图3b所示。 横滚控制是通过前后斜盘沿横滚轴等距倾斜,即通过前后风道的纵向循环节距来实现的。 就实现了,如图3c所示。 最后通过前后两个导管纵向周期节距的微分变化得到偏航运动,如图3d所示。
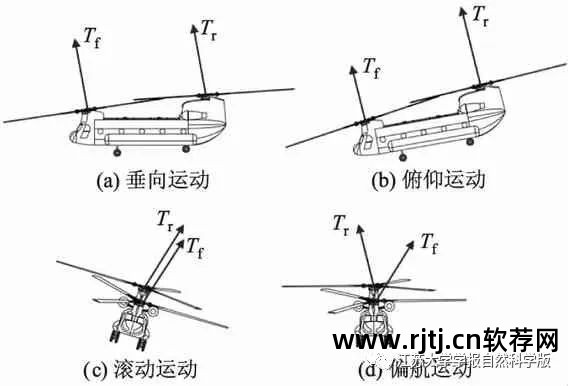
图3 串联式无人直升机飞行控制原理
2 飞控系统硬件设计 2.1 飞控系统总体硬件设计
串联式无人直升机的飞控系统硬件按照模块化设计理念可分为以下模块:主控模块、传感器模块、遥控接收模块、无线通信模块和电流模块。
1)主控模块是串联式无人直升机飞行控制系统的核心控制部分。 其主要任务是处理每个控制周期中姿态传感器采集的数据,通过控制算法估计出无人机的位置姿态信息与遥控器发送的飞行动作控制信号结合进行综合估计并转换估计值结果转化为不同扭矩的脉宽调制(PWM)信号来驱动2个无刷电机和6个数字襟翼,以确保串联无人直升机能够顺利完成目标飞行任务[14]。
2)传感模块是串联式无人直升机飞行姿态参数的检测装置。 它检测的信息主要包括3轴加速度、3轴角速率、航向和姿态信息等。在感知和检测过程中,由于无人机机身振动等外部环境以及传感器本身的限制对检测参数影响很大,进而导致测量的无人机姿态和位置信息不准确。 因此,有必要将加速度计、陀螺仪和磁力计等姿态检测传感器的信息融合起来,以获得无人机相对准确的横滚角、俯仰角和偏航角姿态信息[14-16]。
3)遥控接收模块用于接收遥控器的控制信号,并将遥控信号传输给主控模块。
4)无线通信模块可用于主控模块与上位机之间的通信,完成控制参数的改变,也可将无人机的姿态信息发送至上位机进行显示[2]。
5)电流模块为主控模块及传感、无线通讯模块提供稳定的5.0V和3.3V电流,保证各模块正常工作。
根据上述功能模块设计的整个串联式无人直升机飞行控制系统的整体硬件结构如图4所示。

图4 串联式无人直升机飞行控制系统整体硬件结构
2.2 飞控系统硬件选型及电路设计
2.2.1 主控模块选型及电路设计
综合考虑,采用STM3232HH750750微控制器芯片作为串联式无人直升机控制系统的主控模块芯片。 它拥有CortexTM-M7内核,工作频率高达480MHz。 它采用串行外设接口(SPI)插座与6轴运动处理传感器LSM6DSR、磁力计LIS2MDL通信。 采用PPM方式读取遥控器接收到的遥控信号,利用定时器TIM2和TIM3输出电机怠速PWM和数字襟翼控制信号。
2.2.2 姿态测量模块
串联式无人直升机姿态测量单元采用LSM6DSR惯性模块作为机身姿态测量的传感器。 LSM6DSR是意法半导体于2019年6月推出的一款高性能MEMS惯性模块,模块封装内包含3轴数字加速度计和3轴数字陀螺仪,角速度全电阻值扩展至4000(° )·s-1,在室温和时间下具有较高的稳定性。 加速度可选电阻值为±2、±4、±6、±8和±16g,陀螺仪可选电阻值为±125、±250、±500、±1000、±2000和±4000( °)·s-1。 LSM6DSR惯性模块的方位及引脚图如下图5所示。本文中该模块用于测量人体姿态,其外围电路设计如图6所示。
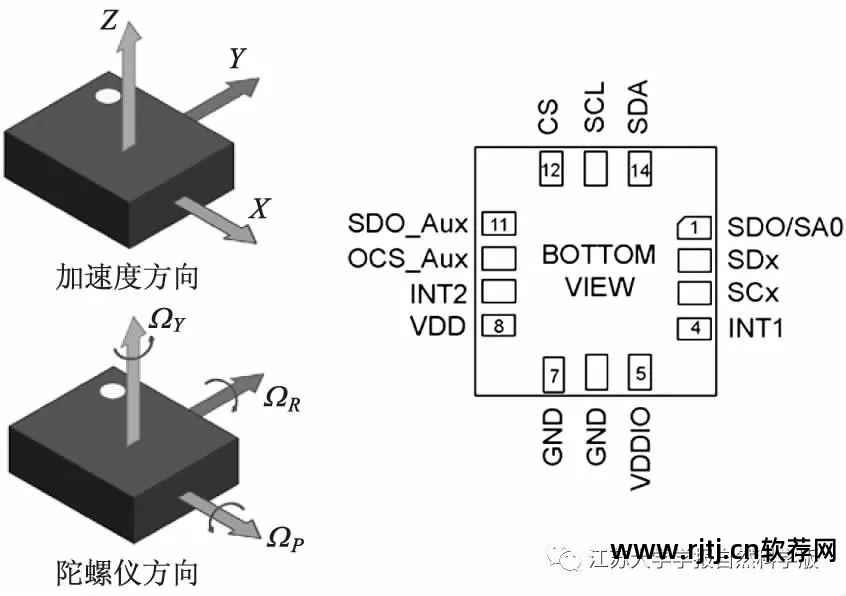
图5 LSM6DSR惯性模块方向及引脚连接示意图
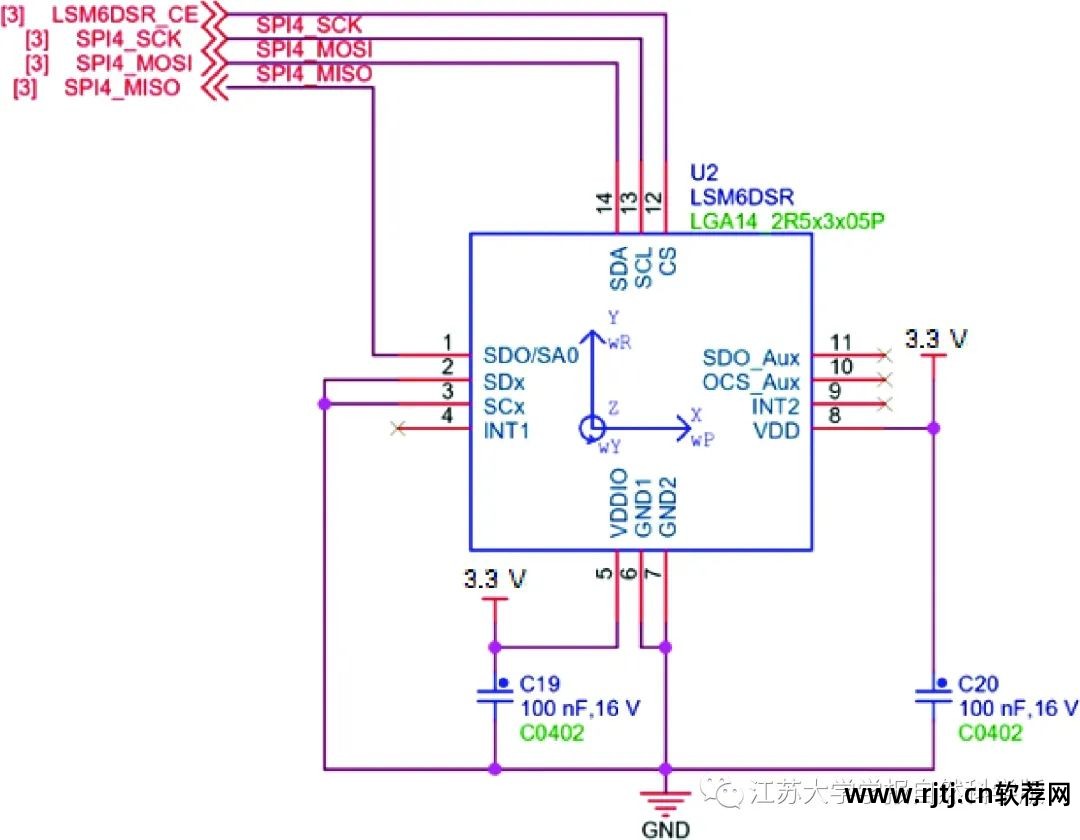
图6 LSM6DSR惯性模块外围电路设计
串联无人直升机的航向由磁力计检测。 该磁力计采用 STMicroElectronics 的 LIS2MDL 传感器。 该组件可检测3轴方向的磁场硬度,动态检测范围为±50×10-4T。 检测值通过16位数据输出,此外,该组件提供两个套接字,SPI和I2C总线。 本文选择SPI套接字形式进行通信。 组件供电电流为1.71~3.60V。 LIS2MDL磁力计模块的方向及引脚连接图如下:如图7所示。本文设计的LIS2MDL磁力计模块的外围电路如图8所示。
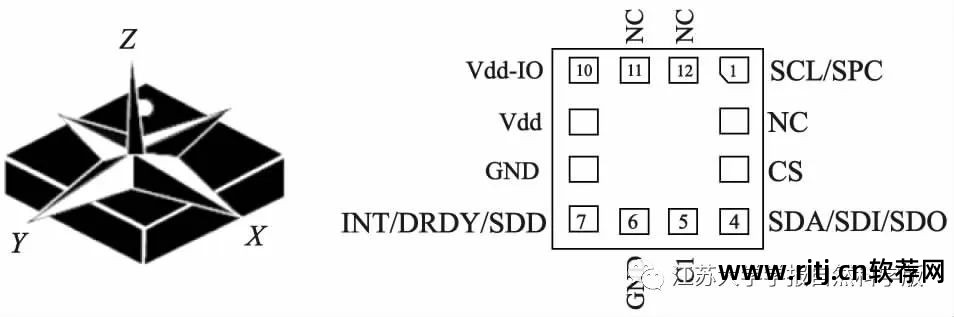
图7 LIS2MDL磁力计模块方向及引脚连接图
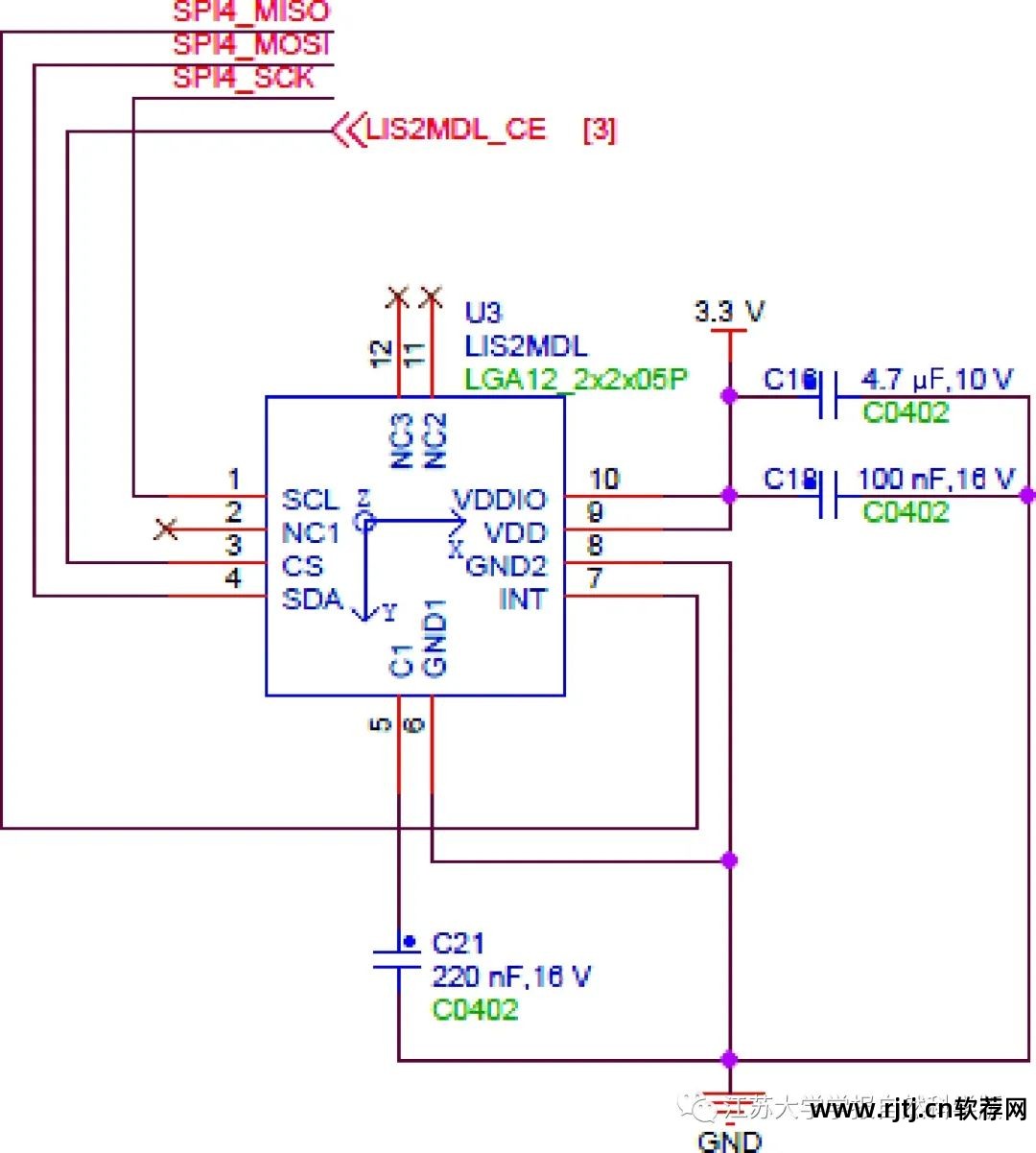
图8 LIS2MDL磁力计模块外围电路设计
2.2.3 遥控接收模块
PWM 和 PPM(脉冲位置调制)是接收器输出信号的两种常见标准。 PWM信号与PPM信号最大的区别在于,PWM的每个化学连接只能传输一路信号,因此有几路信号,需要多组数学连接[17]。 每套化学连接通常有3根线:电源线、信号线和相线。 因此,如果通道数较多,化学连接就会较多,而在PPM模式下,只需要1根电源线、1根信号线和1根地线,总共3根线就可以传输多通道的控制信号,非常方便。 本文中的接收器选用了化石科技的 FS-i6 遥控发射器,与 FS-iA6B 接收器配对组成了 6 通道 2.4GHz 遥控指令系统。
本文采用飞控系统主控芯片STM3232HH750750VBTVBT6的中间定时器TIM1输入捕获方式,检测遥控器上油门、俯仰、横滚、偏航四个通道输入的PWM脉冲长度。
2.2.4 无线通讯模块
ESP-12FWiFi模块作为无线通信模块,与串联式无人直升机的飞控系统进行通信。 借助主机,可以对串联式无人直升机的飞行控制系统进行无线调节。 同时,串联双引擎无线载人直升机的姿态信息还可以通过并口WiFi模块发送至上位机进行显示。
ESP-12FWiFi模块由安信科技研发。 该模块的核心处理器ESP8266在更小的封装中集成了业界领先的TensilicaL106超低帧率32位微型MCU。 具有16位精简模式,显存支持80MHz和160MHz,支持RTOS,集成Wi-FiMAC/BB/RF/PA/LNA。 ESP8266负责无线上网。 当承担 WiFi 适配器的任务时,它可以添加到任何基于微控制器的设计中。 连接简单易行。 只需使用 SPI/SDIO 插座或 I2C/UART 端口即可。
2.2.5 电源模块
本文飞控系统模块的供电电流由无刷电子调速器自带的BEC供电。 其输出电流在5~8V范围内可调,但飞控系统中不同的模块和传感器有不同的电流需求。 ,需要5.0V和3.3V两种电流,因此本文设计了5.0V和3.3V两种稳压电源电路,如图9所示。
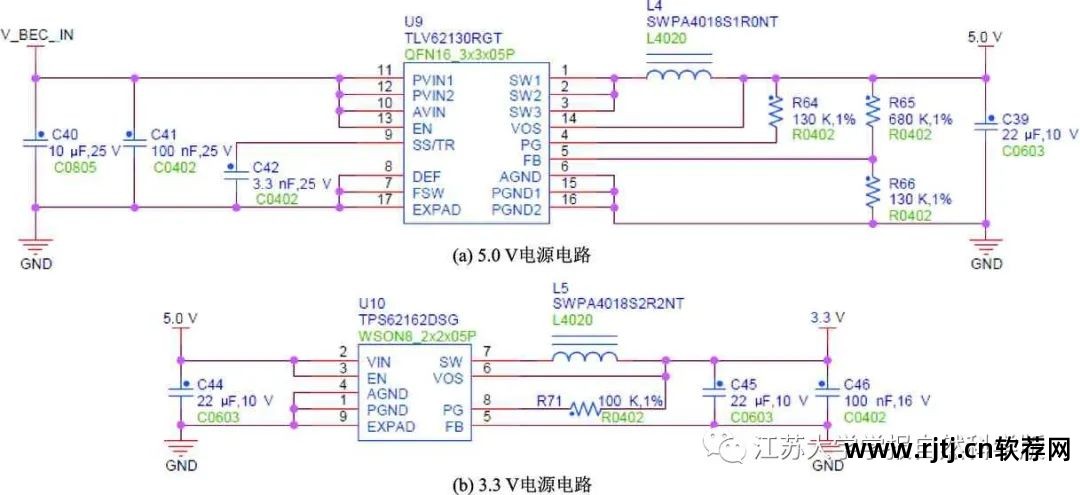
图9 稳压电源电路
3 飞行控制系统软件设计 3.1 系统软件流程
根据不同的功能设计,串联式无人直升机飞行控制软件系统可分为系统初始化、姿态数据采集、控制律计算、电机和襟翼控制、无线数据传输和地面控制站六个模块。 程序流程如图10所示。
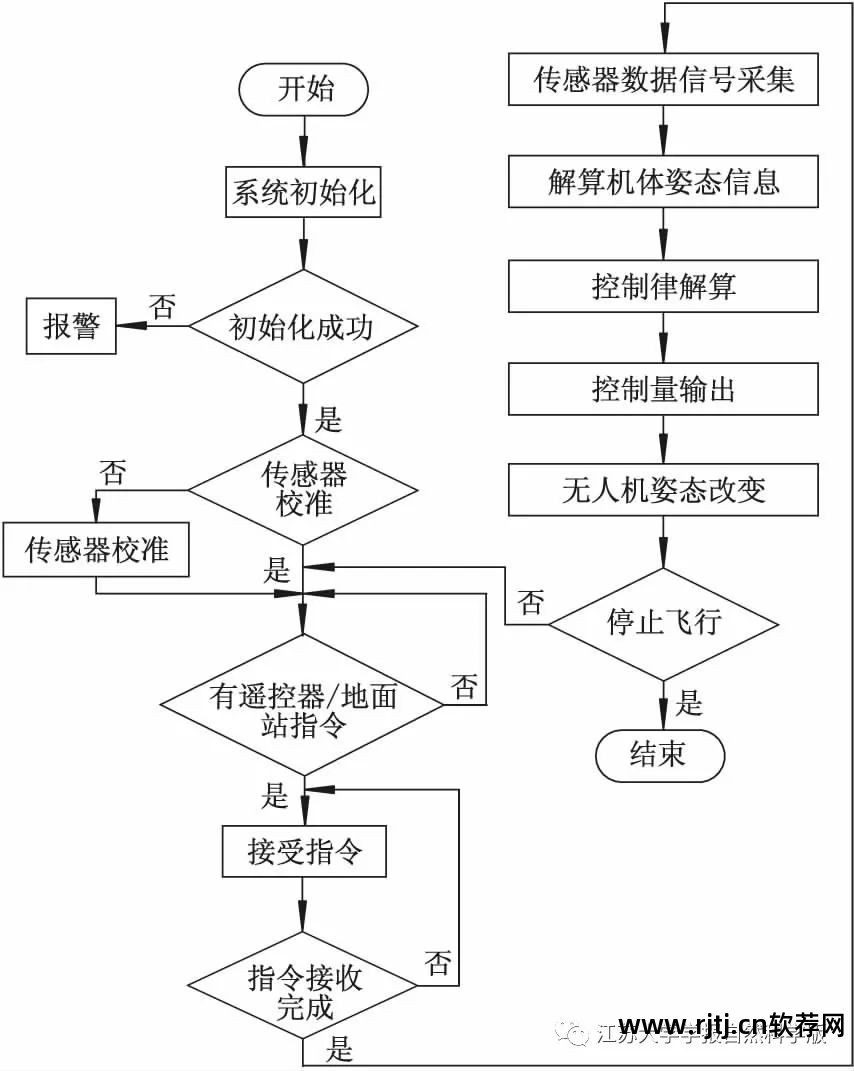
图10 串联无人直升机主程序流程图
3.2 子模块软件设计
在串联式无人直升机飞行控制系统软件子模块软件设计中,姿态数据采集模块和控制律求解模块的软件设计是重点和难点[2]。
3.2.1 姿态数据采集模块软件设计
姿态数据采集模块的软件设计主要包括初始化、数据采集和数据计算三个部分。
1) 模块初始化。 初始化主要是设置寄存器,包括6轴运动传感器LSM6DSR和3轴磁力计LIS2MDL的初始化。
2)数据收集。 数据采集首先通过SPI总线采集数据并保存在链表中,然后将数据合并成需要的数据格式。
3)数据解释。 数据解释的目的是将采集到的数据转化为姿态角,即横滚角、俯仰角和偏航角。 此外,数据解释还涉及多传感器信息融合,以解决陀螺仪积分偏差发散、温度漂移现象以及加速度计动态性能差等问题[2]。
身体坐标系到地面坐标系的旋转矩阵[18]R为

(1)
式中:s和c分别表示余弦和正弦函数; φ 为横滚角; θ为俯仰角; ψ 是偏航角。
为了防止数据融合过程中使用欧拉角表示姿态导致求解旋转矩阵计算量较大的问题,采用四元数表示旋转矩阵为[19]
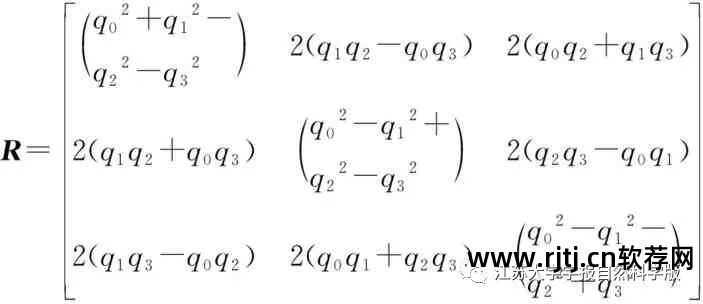
(2)
由以上两式可计算出飞行器的姿态角为
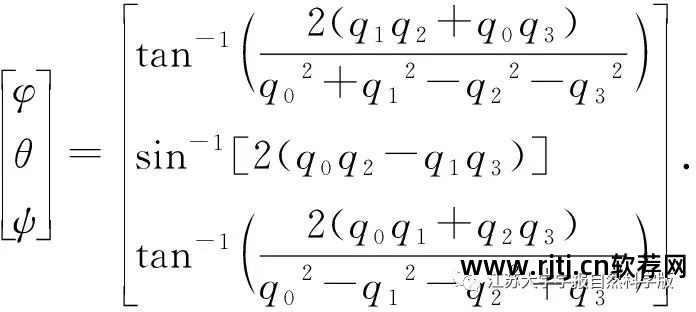
(3)
通过四元数互补混合算法融合获取的加速度、角速率和磁场数据,可以获得准确的姿态角信息。 根据四元数获取姿态角的过程如下:
态度角度.偏航=atan2(2f*(q1q2+q0q3),q0q0+q1q1-q2q2-q3q3)*57.3f;
态度_角度.rol=atan2(2f*q2q3+2f*q0q1,q0q0-q1q1-q2q2+q3q3)*57.3f;
Attitude_angle.pit=asin(2f*(q0q2-q1q3))*57.3f。
3.2.2 控制律求解模块软件设计
控制模块软件利用传感器反馈的姿态角,采取一定的控制策略来完成遥控接收器或导航方案给出的控制任务[2]。 本文采用级联PID控制串联无人直升机的姿态。 控制,第二环控制角速率,外环控制角度。 串级PID控制原理如图11所示。
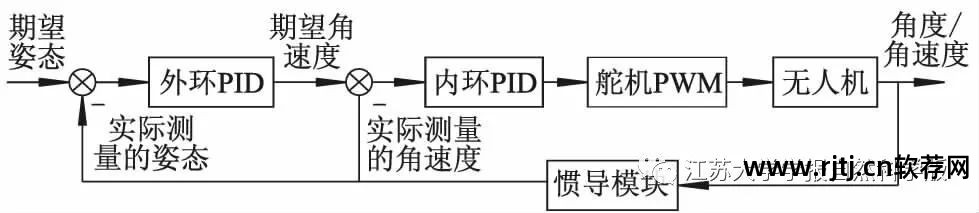
图11 串联式无人直升机串级PID控制原理图
串联式无人直升机飞行控制系统的PID控制算法程序实现如下:
voidpid_cal(structpid_data_t*pid_para,floattarget,floatmeasure)
pid_para->error=目标测量;
pid_para->积分+=pid_para->错误;
pid_para->differ=-(measure-pid_para->measure_last);
pid_para->error_last=pid_para->error;
pid_para->measure_last=测量;
pid_para->p_out=pid_para->kp*pid_para->错误;
pid_para->i_out=pid_para->ki*pid_para->积分;
pid_para->d_out=pid_para->kd*pid_para->differ;
pid_para->输出=pid_para->p_out+pid_para->i_out+pid_para->d_out;
4 系统调试与飞行试验 4.1 软件开发平台
整个程序开发过程使用软件集成开发环境KEIL5。 您可以选择C或C++语言进行编程,然后进行编译、链接和调试。 您可以轻松地将调试好的程序上传到单片机,还可以进行在线调试。
4.2 系统调试
系统调试分为硬件调试、软件调试和软硬件联调三个阶段。 硬件调试是基于PCB板的点焊,进一步确认硬件电路无故障,为各模块正常工作提供硬件环境[2,20]。 主要调试内容包括电源转换电路、STM3232HH750750VBTVBT6最小系统、姿态传感模块、无线通信模块和遥控接收模块。 飞控系统软件包括上位机(地面站)调试软件和下位机飞控软件两部分。 上位机调试软件主要测量上位机与下位机通信的并口收发合约是否正确。 下位机飞控软件的调试依赖于系统硬件,主要衡量各模块的正常运行以及控制算法参数的调试。 软件和硬件联调的目的是使整个飞控系统正常稳定工作,最终实现遥控飞行等[2]。
4.3 飞行试验
串联式无人直升机的飞控试验存在一定的风险。 一旦失控,不仅会破坏车身平台和部件,甚至可能伤及测试人员。 因此,有必要设计一个安全可靠的测试方案。 本文采用“系留测试+飞行遥控测试”的测试方案:①搭建系留测试平台,进行系留遥控测试,基本确定各通道的控制参数,使姿态相对稳定。可在工作台上进行控制; ②进行飞行遥控测试,进一步调整参数,使其在空中飞行更加稳定。
4.3.1 网络共享测试
各通道的网络共享测试基本相似。 本文以音调通道的网络共享测试为例。 俯仰测试方法如下:抬起遥控器的俯仰手柄,观察无人机能否很好地跟随控制意图。 测试过程中将测试的PID参数从小到大改变,直到无人机能够更好地跟踪操作者的控制意图并记录PID控制参数。 俯仰通道的具体测试过程如下:当串联无人直升机的俯仰角在0°附近时(俯仰角范围在数学上是有限的,从最小-6.5°到最大4.5°,俯仰角可被主机读取),向上按下俯仰手柄,当俯仰角达到最大4.5°时,再反方向转动俯仰手柄,到最小位置停止俯仰-6.5°,观察整个俯仰测试过程。 串联式无人直升机俯仰通道的俯仰过程如图12所示。
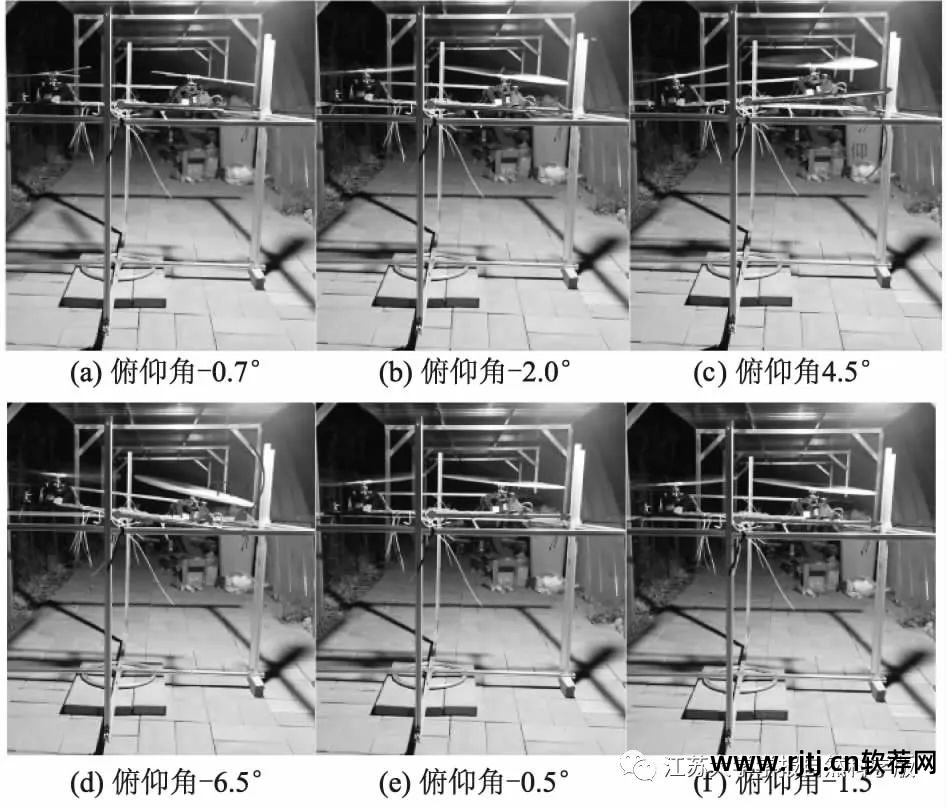
图 12 音调通道网络共享测试
为了证明上述测试结果,对测试观测结果进行了量化,观察了上位机上显示的惯性导航传感器测量的俯仰角随时间变化的数据波形,如图13所示。
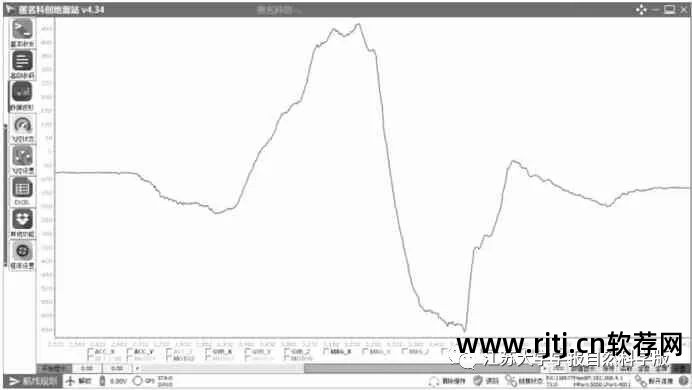
图13 俯仰角随时间变化的数据波形
从图13可以看出,俯仰通道能够较好地跟踪指令信号,偏差角度在可接受的范围内,基本满足测试要求。 横滚通道和偏航通道的测试方法与俯仰通道测试方法类似,测试也达到了预期的控制效果,只有通过系留遥控测试后才能更稳定地控制机体姿态,并且可进行飞行遥控测试。
4.3.2 飞行遥控测试
遥控飞行测试对飞行场地有一定的要求,需要比较低,首飞场地不能有行道树、电线杆、围观者。 此次试飞对天气条件也有一定要求,要求风速低、能见度高,以便于观察纵队。 无人直升机首次飞行时的情况。 此外,还需要视频记录设备来记录试飞。 由于试飞具有危险性,为了防止螺旋桨叶片伤害试飞人员以及保护机身,对机身的防护装置进行了降下。 最终,根据首飞需求,选定中农航天智能农业综合示范园内的猕猴桃果田作为试验场地。 飞行试验情况如图14所示。遥控试验表明,本文设计的飞控系统可以控制串联式直升机的姿态,稳定控制,达到了预期的设计目标。

图14 串联无人直升机飞行遥控测试
5 结论
本文从硬件设计、软件设计、系统调试和飞行测试等方面详细介绍了串联式无人直升机飞行控制系统的设计和实现过程。 测试中,进行了软硬件系统的联调、Tethering测试和发布远程控制测试。 飞行试验表明,所设计的飞行控制系统初步实现了对飞机姿态的有效控制。
参考
[1] 刘浩鹏,龙黄河,万鹏,等。 植保四轴飞行器的模糊PID控制[J]. 中国农业工程学报,2015,31(1):71-77。
刘HP,龙成杰,万普,等.四轴飞行器模糊自调比例积分微分法[J].农业工程学报,2015,31(1):71-77.
[2] 李杰,齐晓辉,韩树涛,等。 大型四通道无人机飞行控制系统设计与实现[J]. 中国测试,2014(2):90-93。
LIJ,QIXH,HANST,etal.小型四旋翼飞行器飞行控制系统的设计与实现[J].中国测试技术,2014(2):90-93.
[3]HEXK,BONDSJ,HERBSTA,等.东亚植物保护无人机的最新发展[J].国际农业与生物工程,2017,10(3):18-30.
[4]薛新宇. 农业及民航植保技术现状[J]. 农业技术与武器,2014(5):16-18。
薛雪. 农业航空植保技术现状[J].农业技术与装备,2014(5):16-18.
[5]廖宜华,张铁民,兰玉斌。 农田信息采集多通道无人机姿态稳定控制系统设计与测试[J]. 中国农业工程学报, 2017, 33(3): 88-98.
廖玉华,张TM,兰伊波.应用于农田信息采集的多旋翼载人飞行器姿态稳定控制系统设计与试验[J].农业工程学报,2017,33(3):88-98.
[6] 胡春华. 串联式无人直升机建模与非线性控制[D]. 上海:复旦大学,2004。
[7]DZULA, HAMELT, LOZANOR. 串联旋翼直升机的非线性控制[J].IFAC会议论文集,2002,35(1):229-234.
[8]FERGUSONK,THOMSOND,ANDERSOND,etal.Comparingtheflightdynamicscharacteristicsoftandemandconventionalhelicoptersforthe Purposesofautomaticcontrol[C]∥41stEuropeanRotorcraftForum,2015:1-12。
[9]LALIBERTEF,SAUSSID.可变载荷串联直升机的鲁棒控制[J].国际自动控制联合会,2017,50(1):15952-15958.
[10]HUC,朱继,黄新,等.基于动态增强方法的无人串联直升机的输出跟踪[J].国际控制自动化与系统杂志,2004,2(2):5387-5391.
[11]于琪. 串联直升机与单导管直升机的对比分析[J]. 直升机技术,2008(2):61-67。
余庆. 串联直升机与单旋翼直升机的比较与分析[J].直升机技术, 2008(2):61-67.
[12]张成林,郭才根。 直升机总体设计[M]. 上海:国防工业出版社,2006。
[13] 李长军. 大型双通道技术验证机的设计与研究[D]. 杨凌: 西南农林学院, 2016.
[14]崔江东. 大型四通道无人直升机飞行控制系统研究与开发[D]. 成都:山西大学,2014。
[15]何六增. 四通道飞行器姿态控制算法研究与实现[D]. 北京:北京民航航天学院,2018。
[16] 杜进,赵华超,郑哲,等。 捷联惯性导航互补检测姿态融合算法设计[J]. 传感器技术学报, 2018, 31(10): 1547-1552.
杜杰,赵HC,郑子,等.基于互补滤波器的低成本捷联惯性导航姿态融合算法设计[J].传感器与执行器学报,2018,31(10):1547-1552.
[17]陈志旺. 四通道飞行器快速启动[M]. 南京:电子工业出版社,2017。
[18]HEZ,GAOW,HEX,等.提高植保四旋翼无人机飞行姿态稳定性的模糊智能控制方法[J].国际农业与生物工程,2019,12(6):110-115.
[19] 彭振辉. 大型四通道无人直升机控制系统设计[D]. 北京:北京理工大学,2010.
[20] 魏媛媛. 无人直升机飞行控制系统设计与工程实现[D]. 上海:上海民用航空航天学院,2016。
