Robot Preview在2月6日报告说,今天,机器人预览从零功率机器人那里获悉,该公司已经完成了数千万元人民币的天使融资,并赢得了数千万的订单。预计该公司今年将达到500多个型号。人形机器人的大规模生产已实施,并用于服务行业,教育,娱乐,展览和其他行业。
零电动机器人于今年1月正式成立,由Tsinghua University和Jac Frontier Technology Collaborative Innovation Center共同孵化。该团队的创意成员全都出生于2000年代,来自Tsinghua大学的AI&Robot智能机器人实验室。它们在机器人操作和运动控制领域取得了出色的成就。他们在顶级机器人会议和期刊上发表了许多学术论文,例如T-RO,CORL,ICRA和IROS。该公司还继续吸引来自Baidu,Bytedance,Iflytek,Midea等公司的人才,重点关注体现情报领域的潜在技术创新以及L2级智能产品的应用和分散化,并具有本体论硬件和AI算法软件完整的堆栈自我开发功能。
该公司已推出了类人体机器人Zerith Z1,该机器人Z11使用AI来协助机器人的结构参数设计,从而实现了更高的动态运动性能和较低的能量消耗。它还开发了一种用于运动控制的物理互动世界模型算法,该算法可以适应各种复杂的工作条件和复杂环境中的盲目步行能力。
▲Zerith Z1在复杂的地形上行走并模仿人类拳击
在概括操作模型中,零功率已为机器人技术领域开发了专有场景泛化操作方案,该方案可以在专有场景中标准化过程,并结合视觉语言模型以分析场景以获得基于过程的任务描述 。在机器人的实际执行过程中,它可以通过分析任务类别来选择不同的解决方案。

▲强大的两臂操作,广义抓取和存储
根据机器人所需的运动比例,任务可以分为两类:长距离运动操作任务和本地长期操作任务。
长途移动任务主要涉及空间转换要求,例如交付和归纳对象。因此,零功率机器人提出了一种通用抓取和放置模型GP-6D,可以将环境信息和任务要求结合起来作为解决方案。 GP-6D使用视觉语言模型来生成最佳的放置位置姿势,并结合了外部感知计划以实现无触摸的放置。
为了解决本地长序操作任务中级联误差传播的问题,该公司提出了一个基于模块化动作基础的复合策略生成框架。该框架构建了一个技能表示系统,用于概括操作对象,将复杂的任务分解为可组合的动作原始素,并通过过滤和组合库中的各种动作原始素来完成任务。
在其中,为了确保技能的成功率,该公司还提出了IRL培训框架,结合了模仿学习的效率和强化学习的稳健性,并通过现实和模拟迭代的交替进行概括。
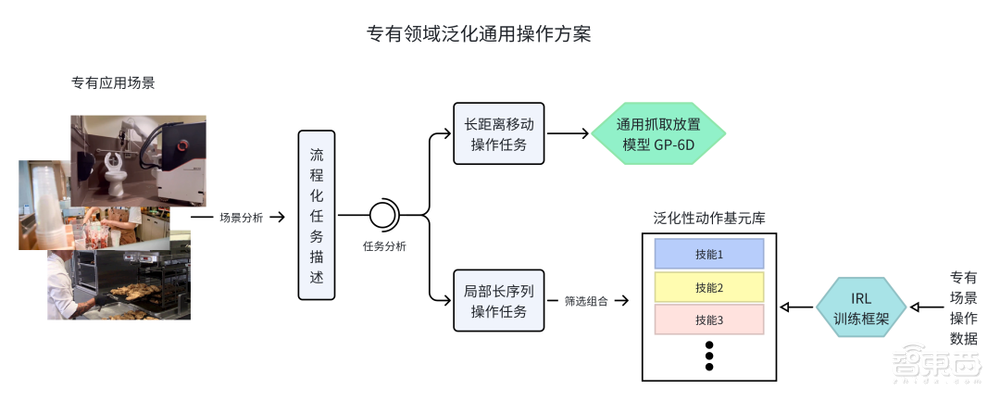
▲专有领域的通用一般操作计划
为了进一步扩展数据源并降低单位数据成本,零功率机器人还开发了一种低成本的单眼相机视觉重映射机器人控制解决方案,该解决方案可以通过廉价的RGB摄像机捕获操作员的运动和行为在机器人上的时间,端到端的操作延迟小于150毫秒,比传统手柄或VR系统低80%以上,比动作捕获技术的硬件成本低99%。
▲重建机器人解决方案
为了应对机器人在使用过程中可能遇到的安全问题,零功率机器人表示,它正在重构现有的稳定版本,并计划启动最“安全的”人体机器人机器人代号为安全性。
