大家好,我叫依查。
智能硬件是继智能手机之后的一个技术概念。 通过软件和硬件的结合,对传统设备进行改造,赋予其智能化功能。 智能化后,硬件具备连接能力飞控led软件教程,实现互联网服务的加载,形成“云+端”的典型架构,具有大数据等附加价值。
智能硬件是一个技术概念,是指通过硬件和软件相结合对传统设备进行智能化改造。 智能硬件移动应用是通过应用程序连接智能硬件的软件。 它们易于操作和开发。 各种应用层出不穷。 它们也是企业获取用户的重要入口。
改装对象可以是电子设备,例如手表、电视等电器; 它们也可能是以前非电子化的设备,比如门锁、茶杯、汽车,甚至房屋。
不知道你心目中的智能硬件是什么? 欢迎在下方评论区互相讨论。
周末又到了分享难点的时候了。 近日,不少粉丝给小编私信表示:好久没有分享实质性的开源硬产品项目了。
今天小编给大家整理了7个智能硬件开源项目。 希望对大家的学习有所帮助。
全文大纲 OmniCopter - 全向无人机无人机仿真 - 无人机飞行仿真 UAVS - 智能无人机路径规划仿真系统XTDrone - 无人机通用仿真平台yiwa-yiwa,家用语音控制“假机器人”天气-墨屏-天气墨屏tiny- 6arm-机械臂OmniCopter
吉特:
介绍
本项目采用Arduino Mega2560微控制器和JY901惯性导航模块来实现姿态和位置控制。
项目索引
应用层(APP)
事务处理层(TPS)
数据处理层(DPS)
配置和数学扩展库
如下所示:

无人机模拟
吉特:
介绍
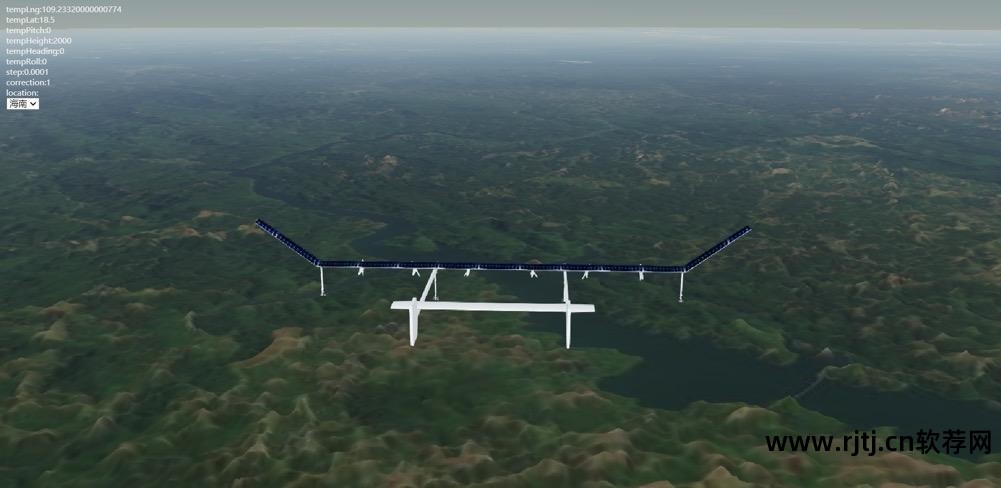
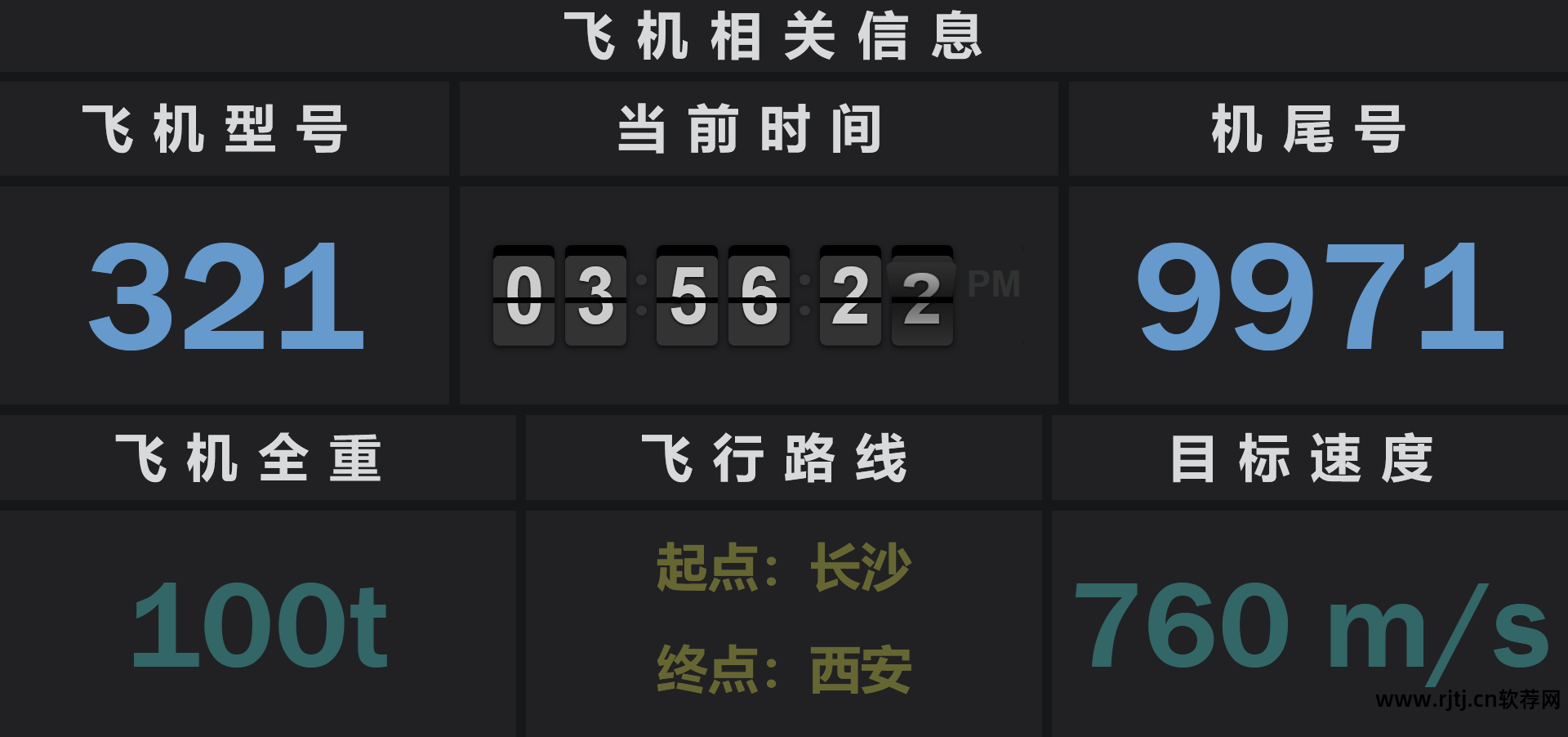
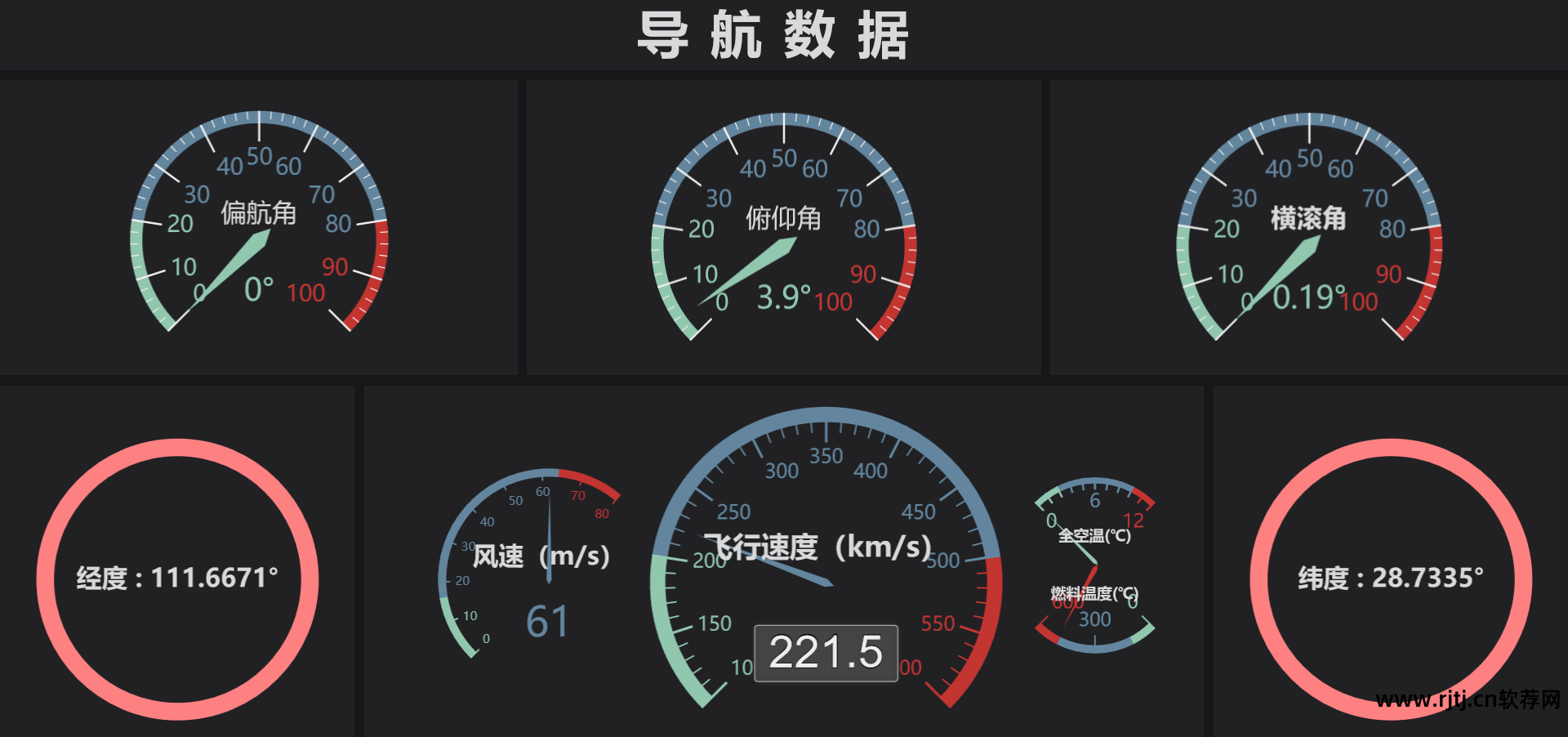
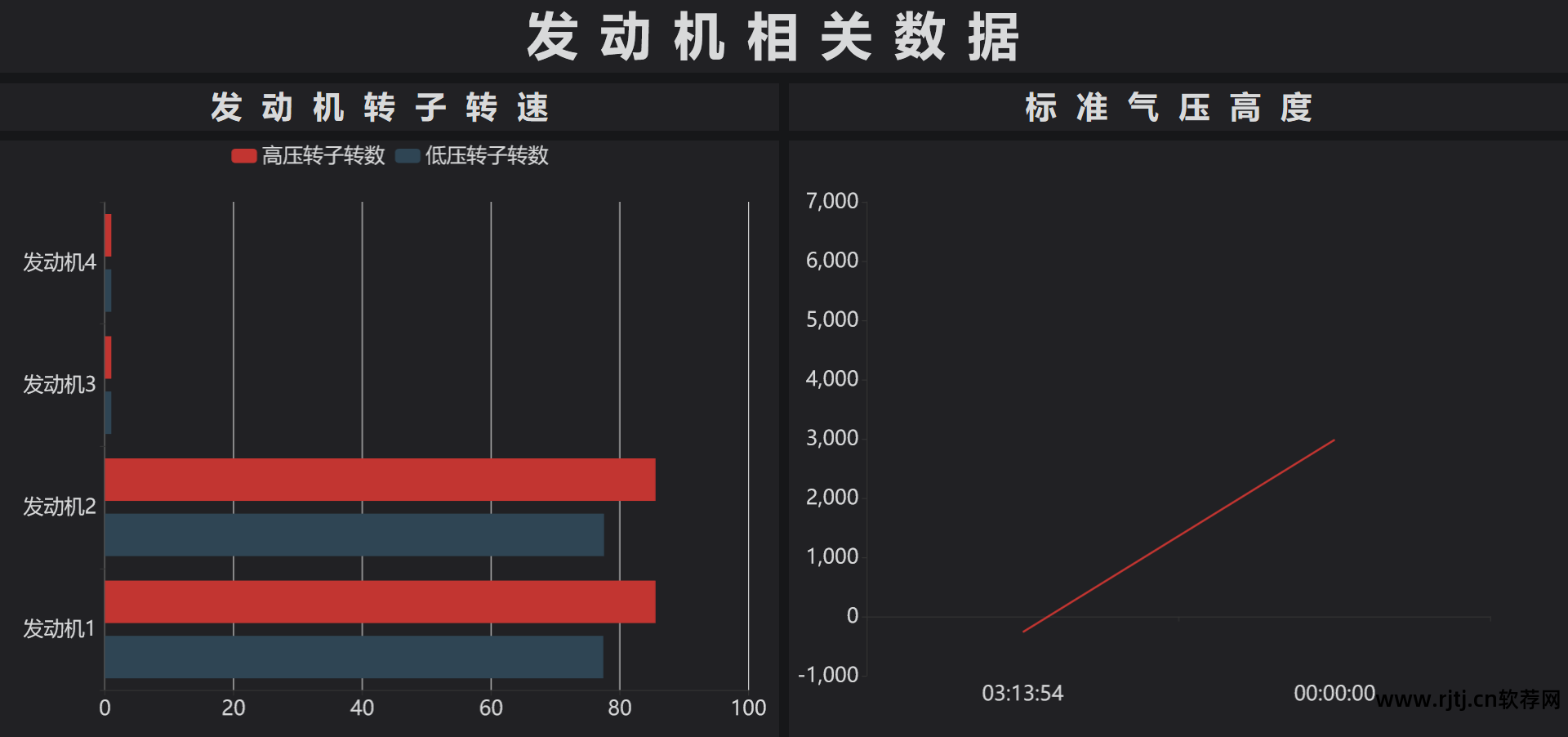
一个在浏览器上运行的基于Cesium的飞行模拟程序。
安装
该项目支持两种飞行模拟模式: 1.手动控制,使用plane.html。 2.通过读取数据库的经纬度自动飞行,使用plane1.html,但需要提前配置数据库。 项目数据库名为sheet2,读取sql下的sheet1.sql。 由于项目保密要求,这个数据库无法开源,所以我们只能开源这个页面的逻辑。
除了map.heml无法使用百度地图离线使用外,其余状态页都可以离线使用。
关于离线地图资源:
支持离线地图,但需要您自行下载地图图块。 这些图块支持精度分级。 这个资源的选择需要更多的考虑。 百度、高德、必应、天图、谷歌各有各的优缺点。 不同的省份有不同的地图支持。 您可能需要再下载几个才能尝试。 这些图块必须首先通过 Rakuten 购买并下载地图,然后通过 CesiumLab 切片成图块。
如下所示:

无人机
吉特:
介绍
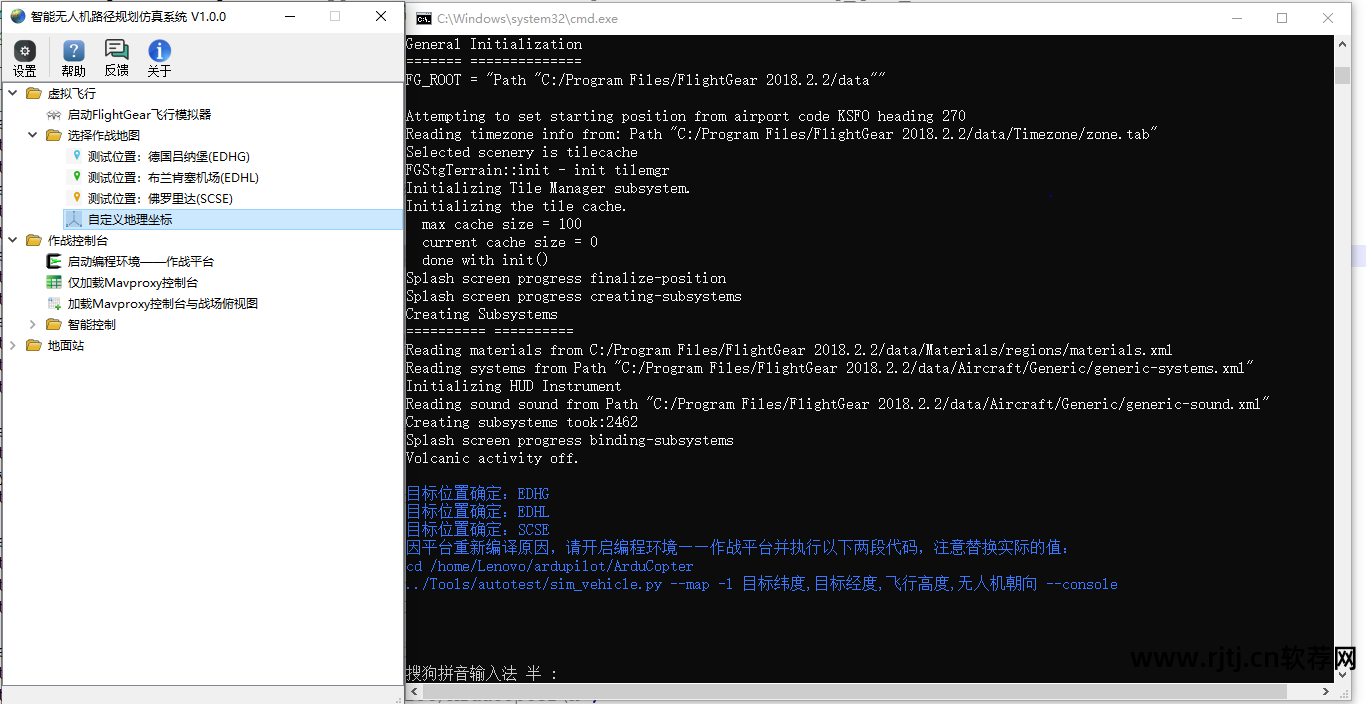
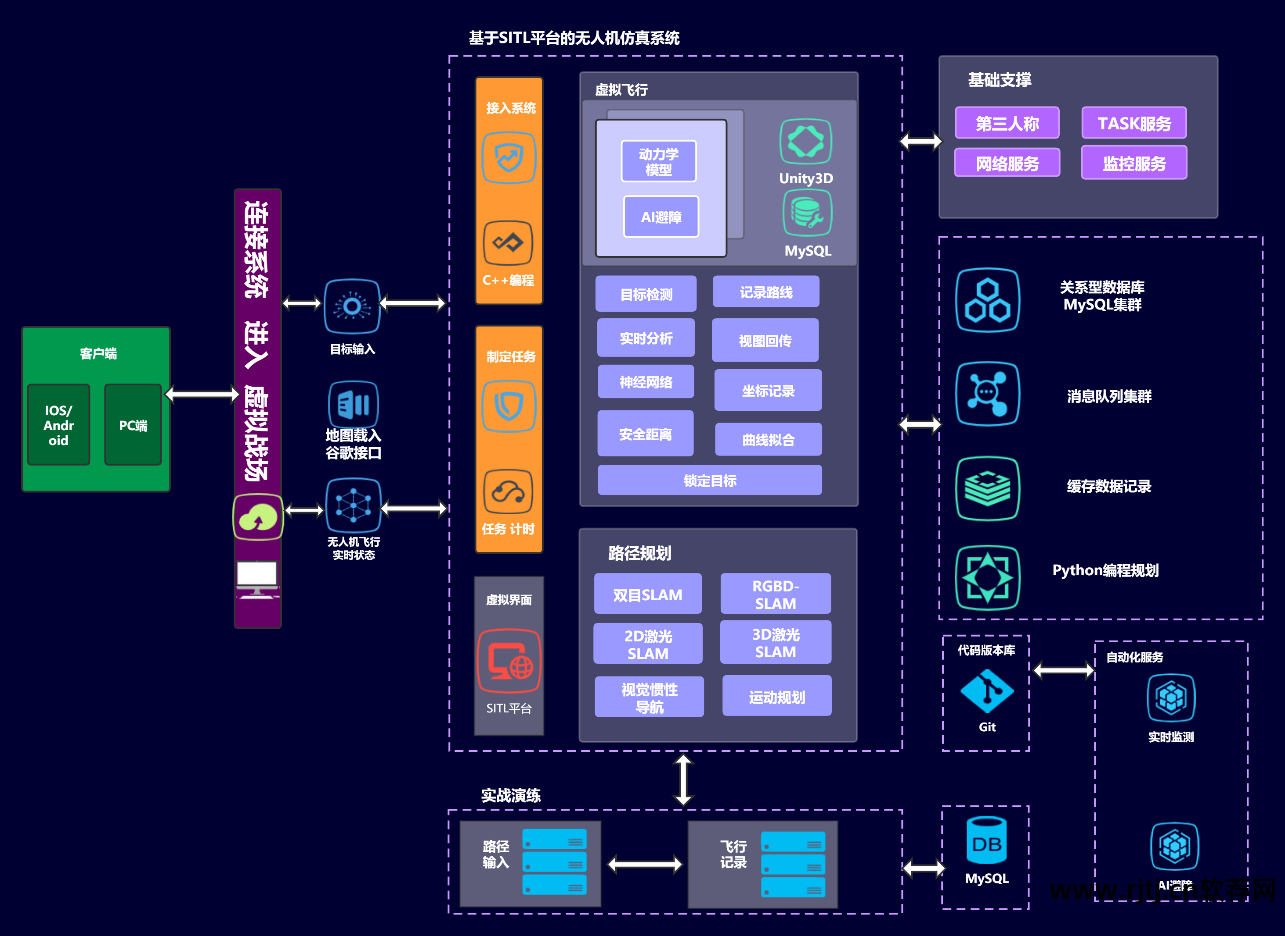
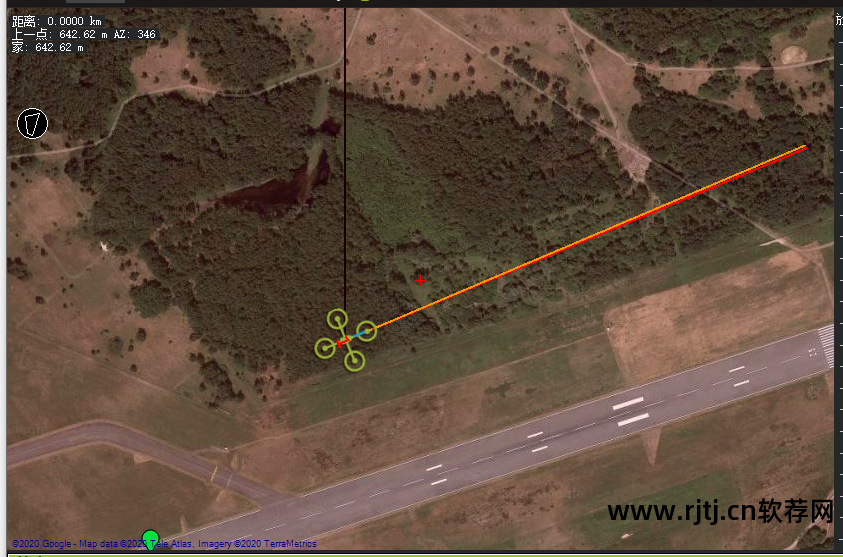
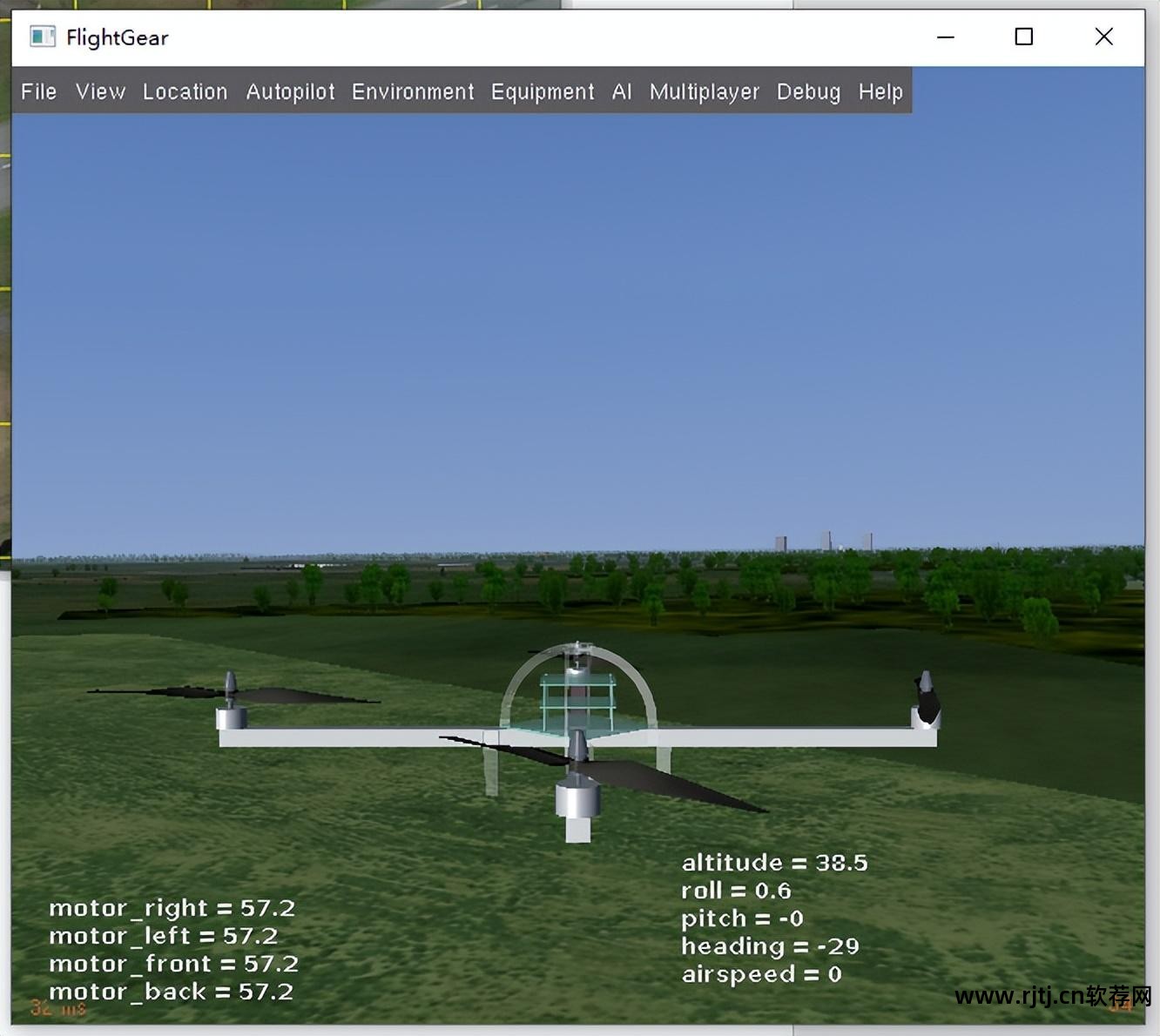
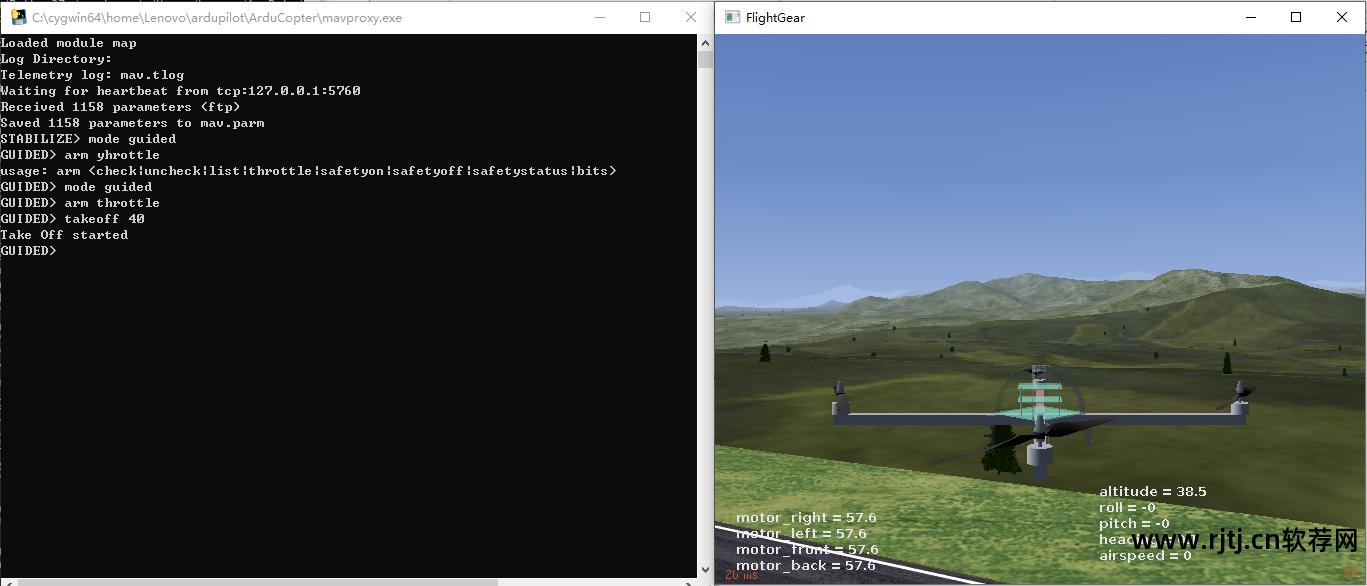
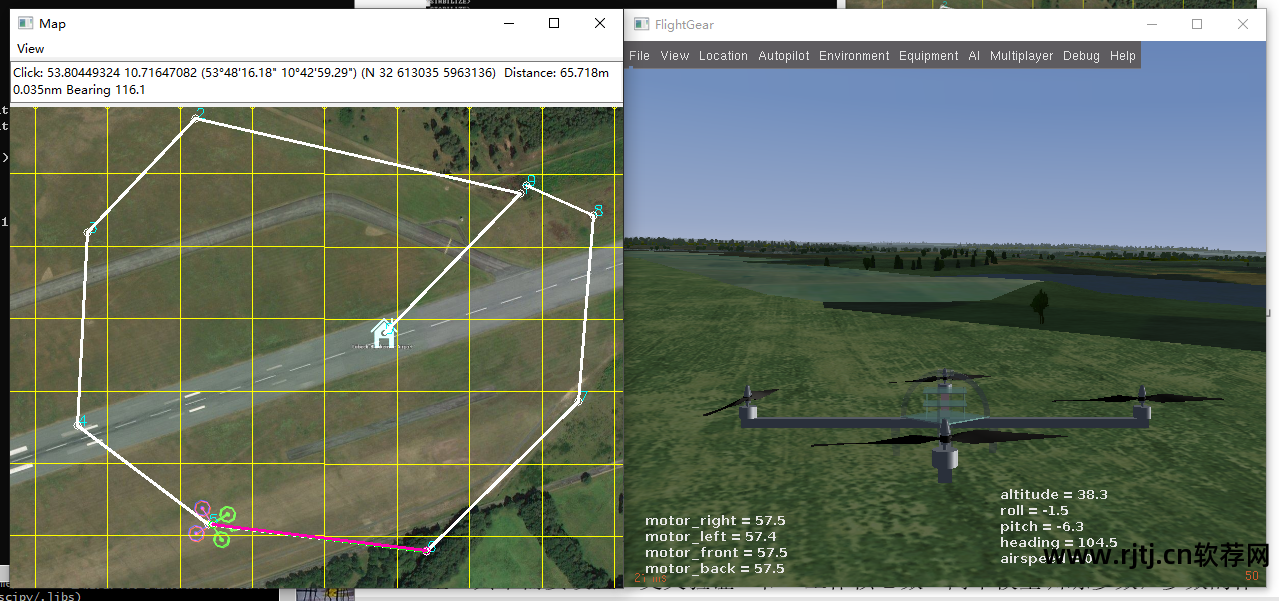
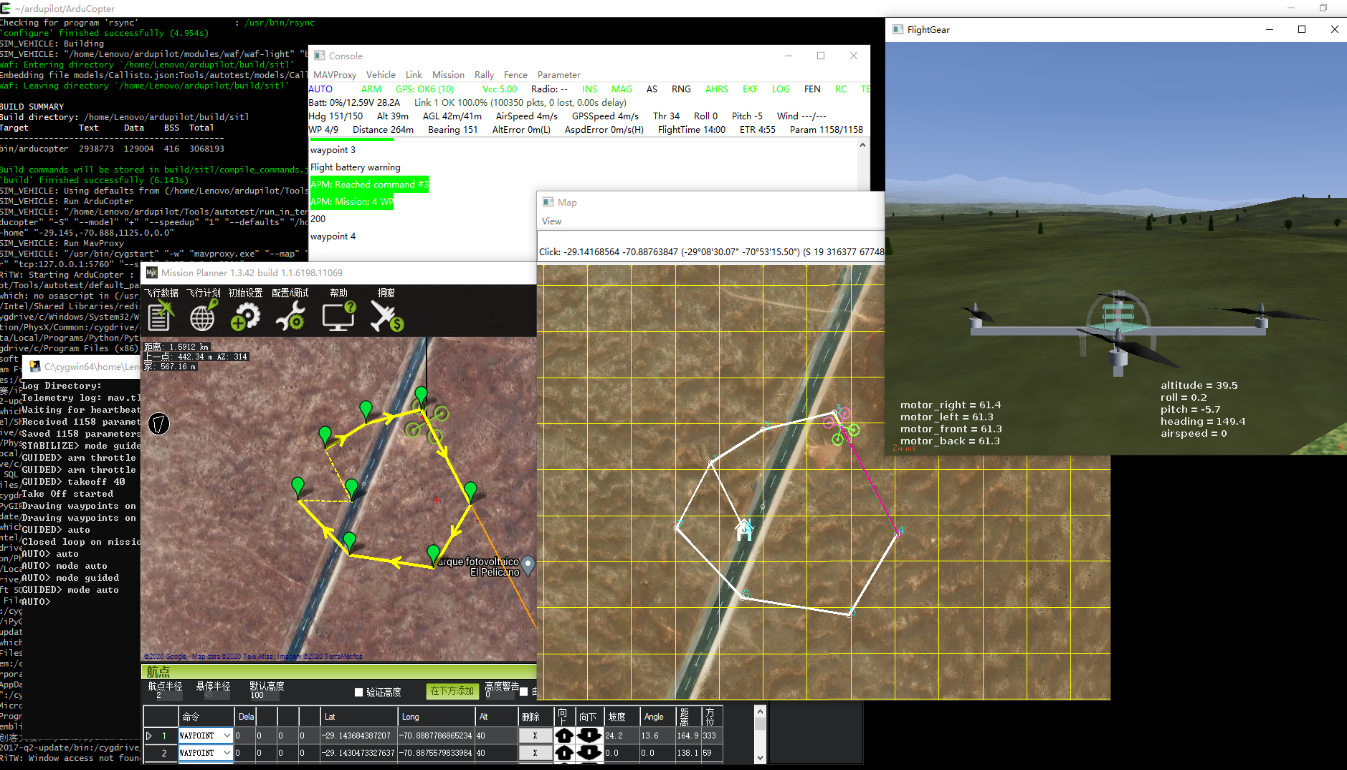
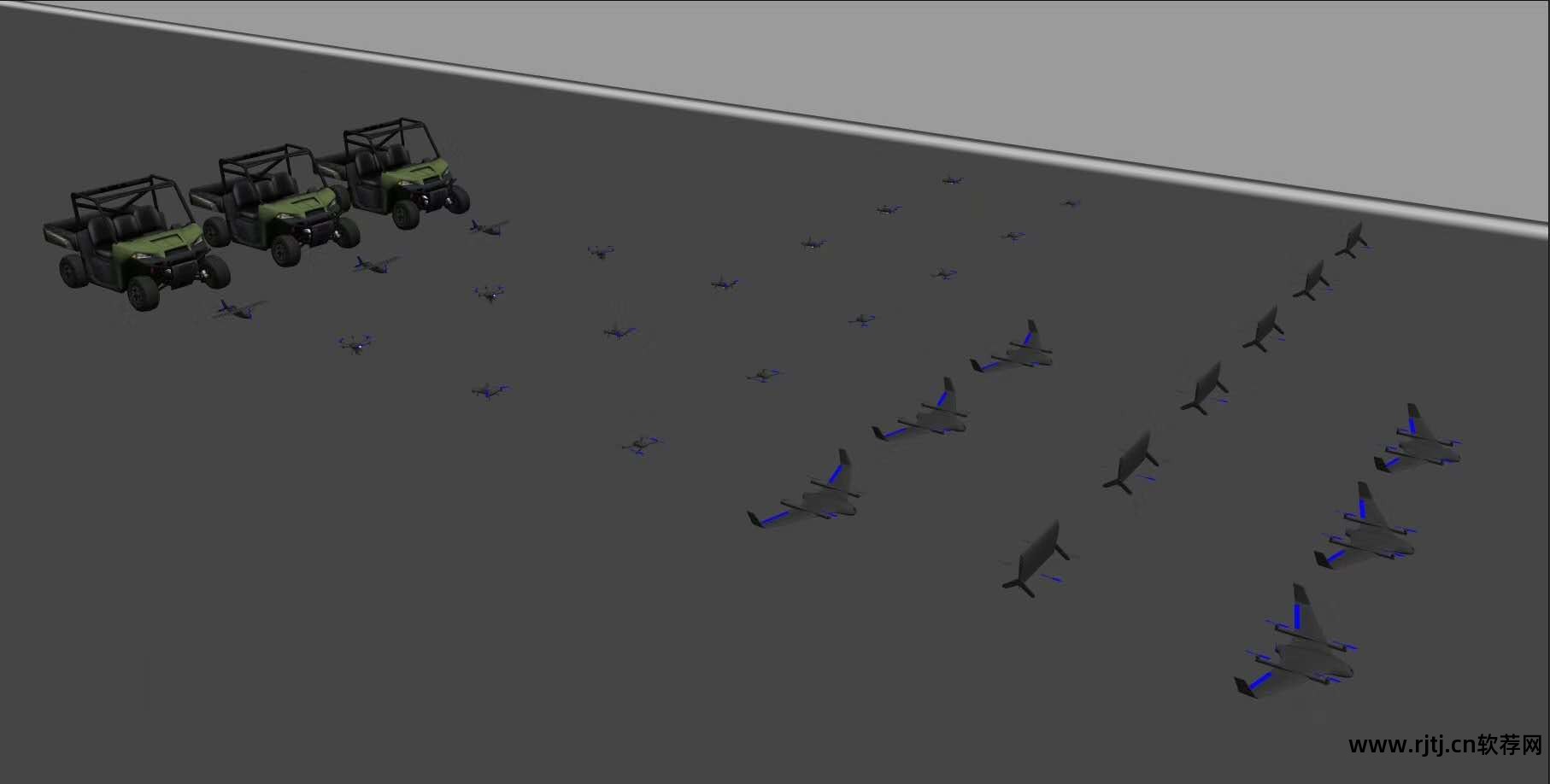
UAVS_Drone智能无人机路径规划仿真系统是一款开源软件,具有操作控制精细、平台集成性强、模型建立全方位、应用自动化等特点。 它以A、B两国在C区进行的无人机战争为背景,系统的核心功能是通过仿真平台规划无人机航线并进行验证输出。 数据可以导入到真实的无人机中,使其符合规定。 该航线精准到达战场任意地点,支持多人、多装备编队联合作战。

特征
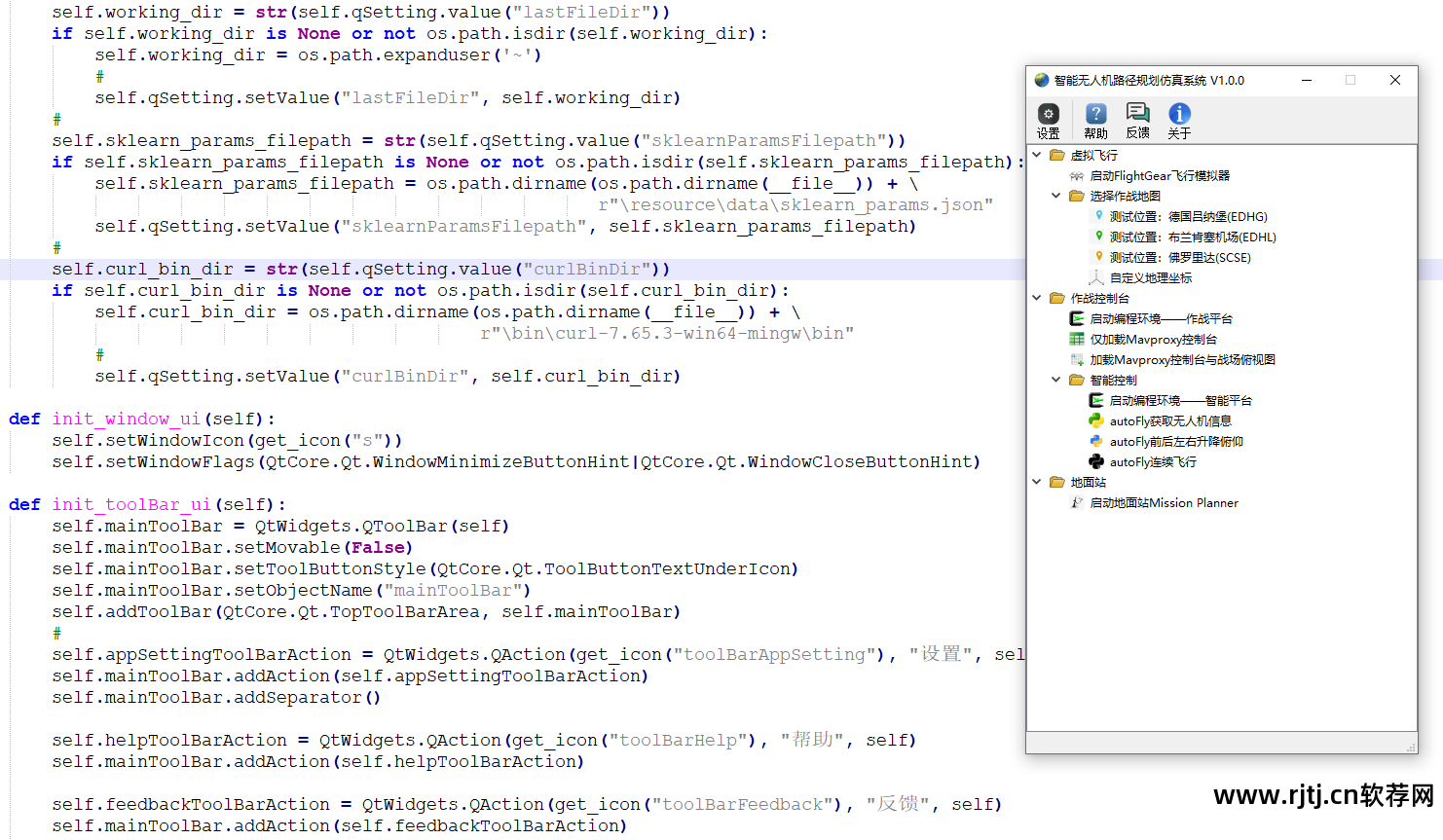
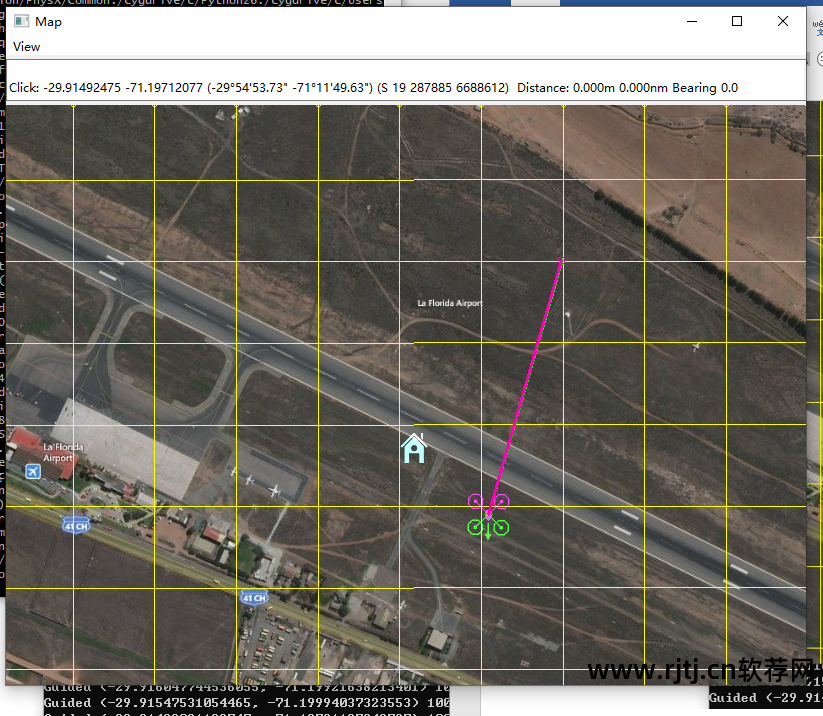
该系统由开源无人机仿真平台SITL支持,利用FlightGear渲染真实战场环境。 集动态模型建模、2D俯视、3D仿真、脚本控制、地面站监测、数据处理等功能于一体。 此外,模拟系统支持加载多种全球地图,模拟各大重点区域的三维环境,可应用于全球遥感监测场景。
如下所示:



XT无人机
吉特:
介绍
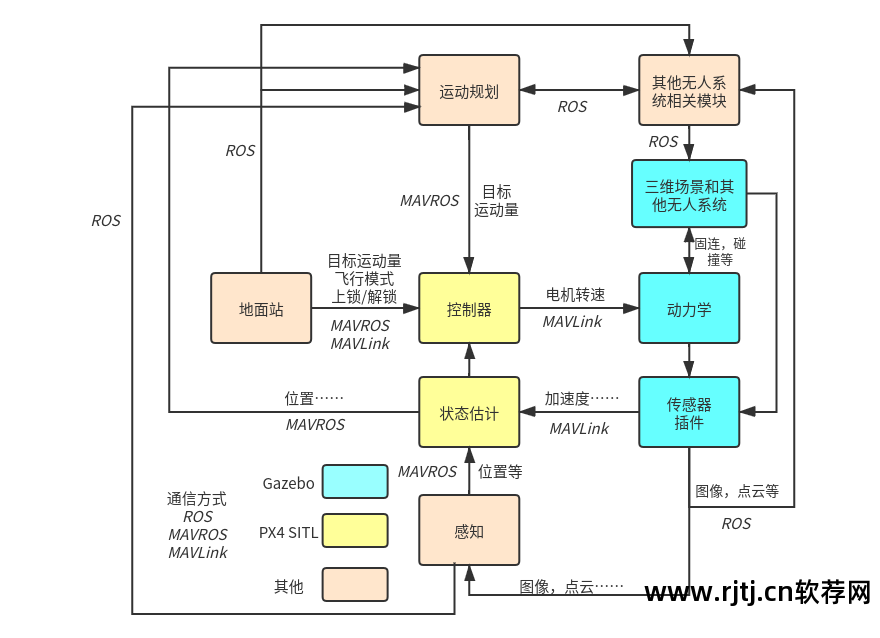
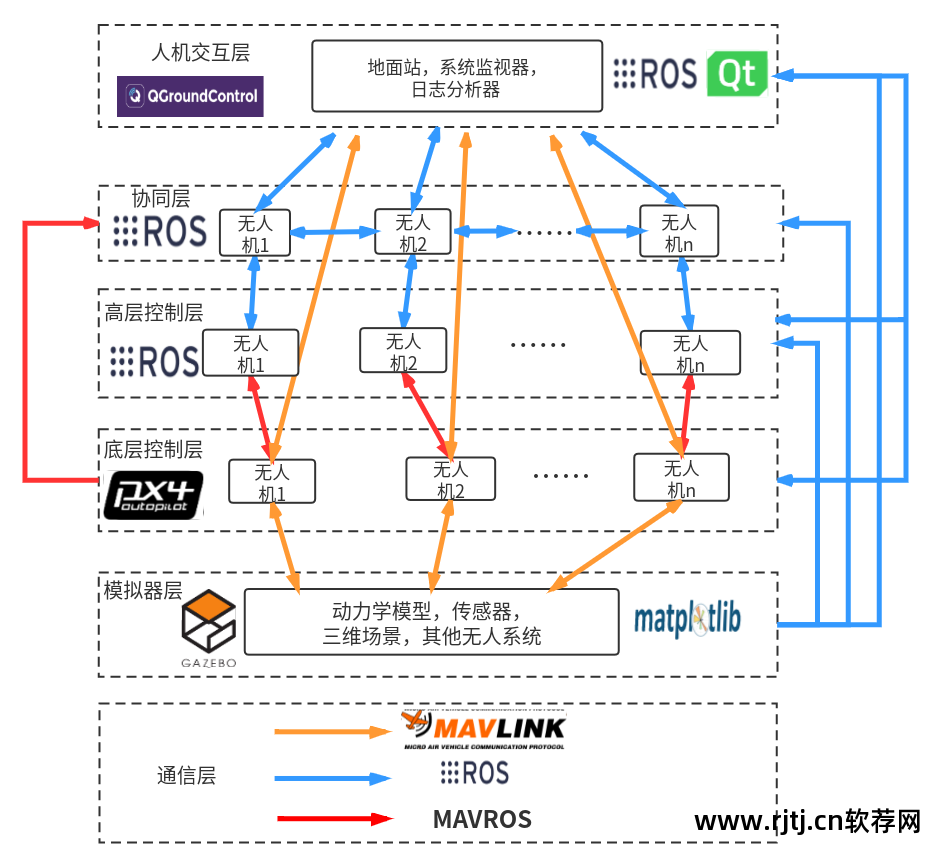
XTDrone是一个基于PX4、ROS和Gazebo的通用无人机仿真平台。 支持多旋翼飞行器(包括四轴、六轴)、固定翼飞行器、复合翼飞行器(包括四翼、尾翼、倾转旋翼)以及其他无人系统(如无人车、无人船、机械臂)。 在XTDrone上验证的算法可以轻松部署在真实无人机上。
如下所示:

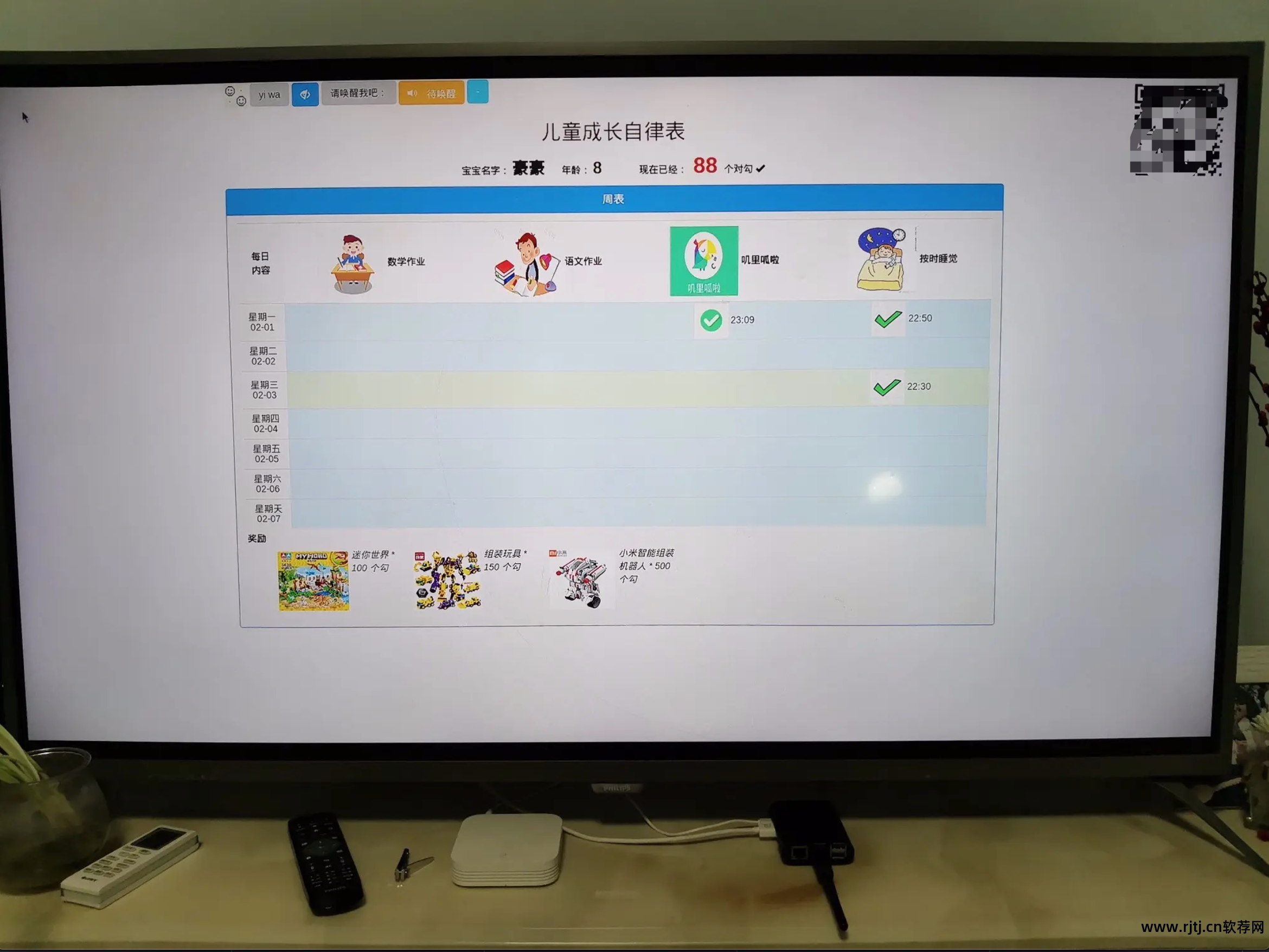
伊娃
吉特:
介绍
如下所示:
语音状态

命令目录


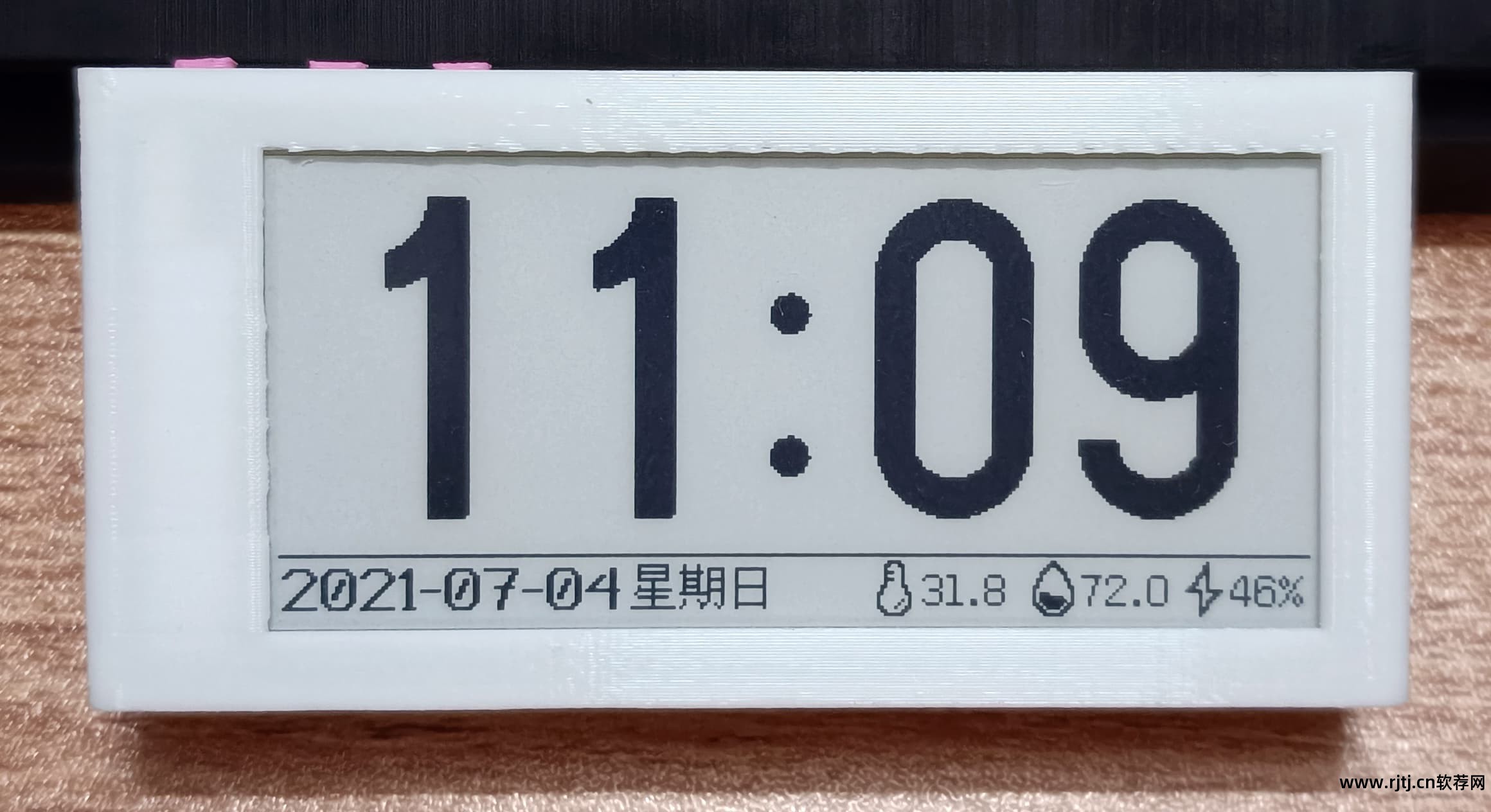
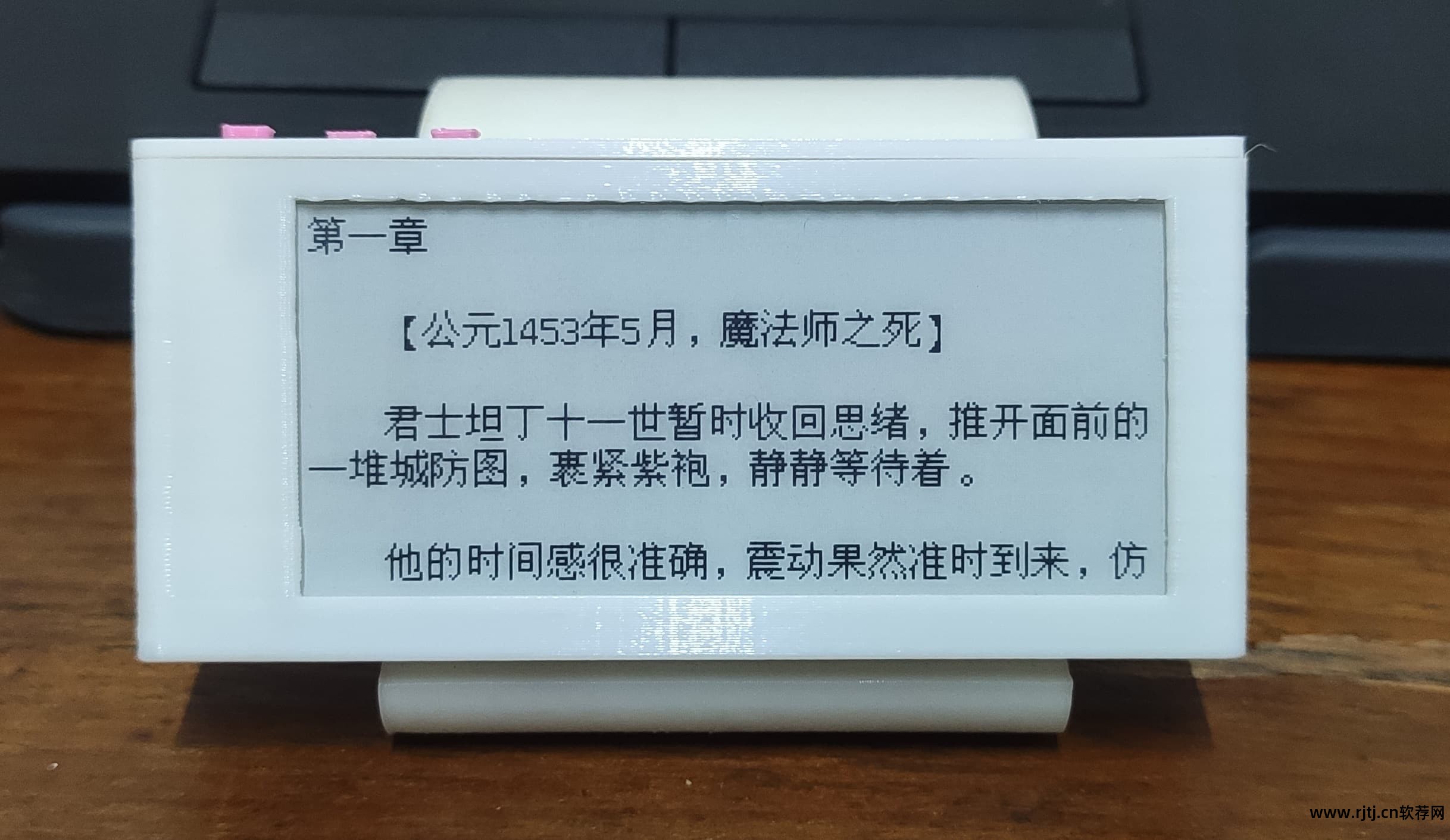
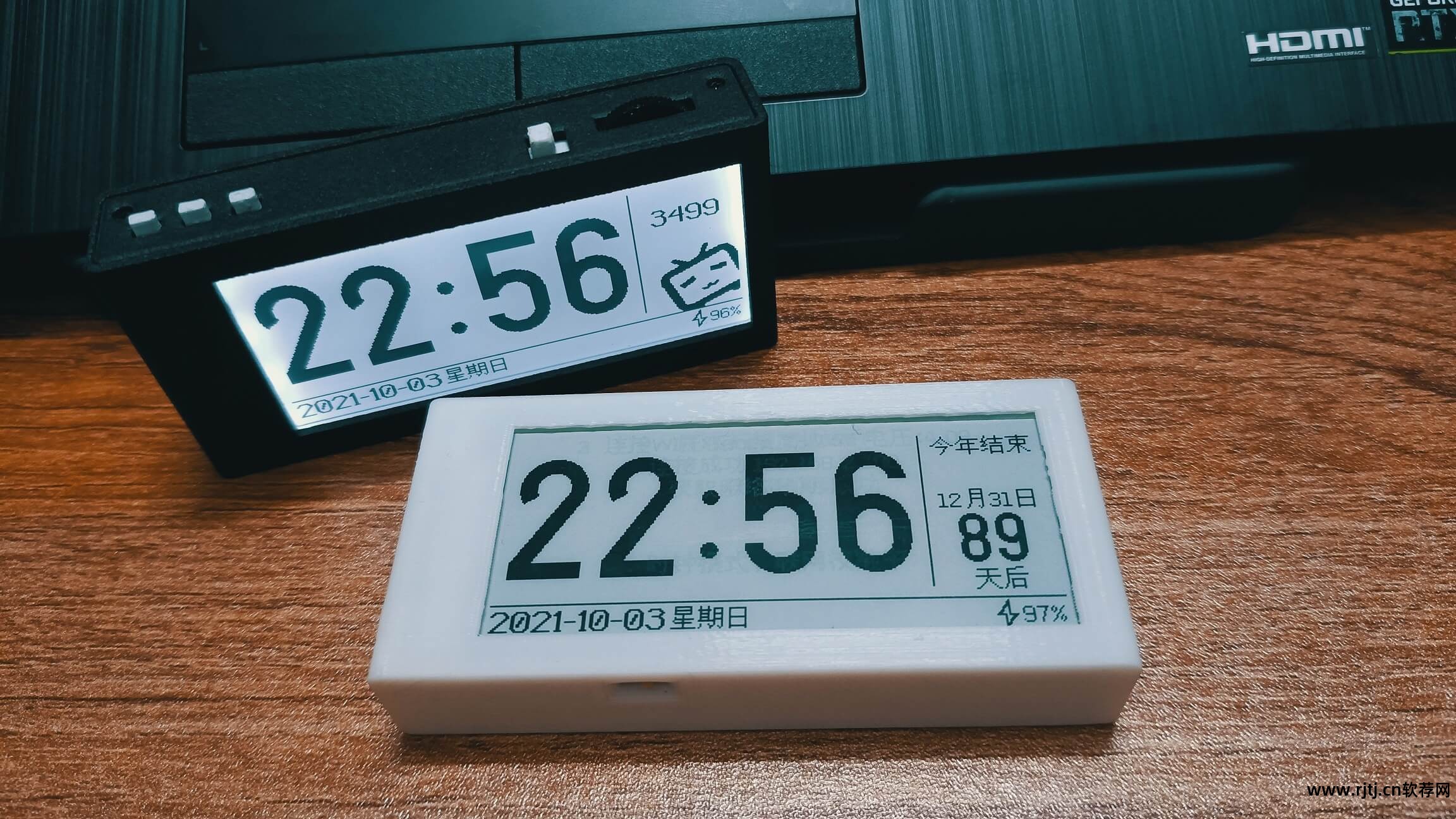
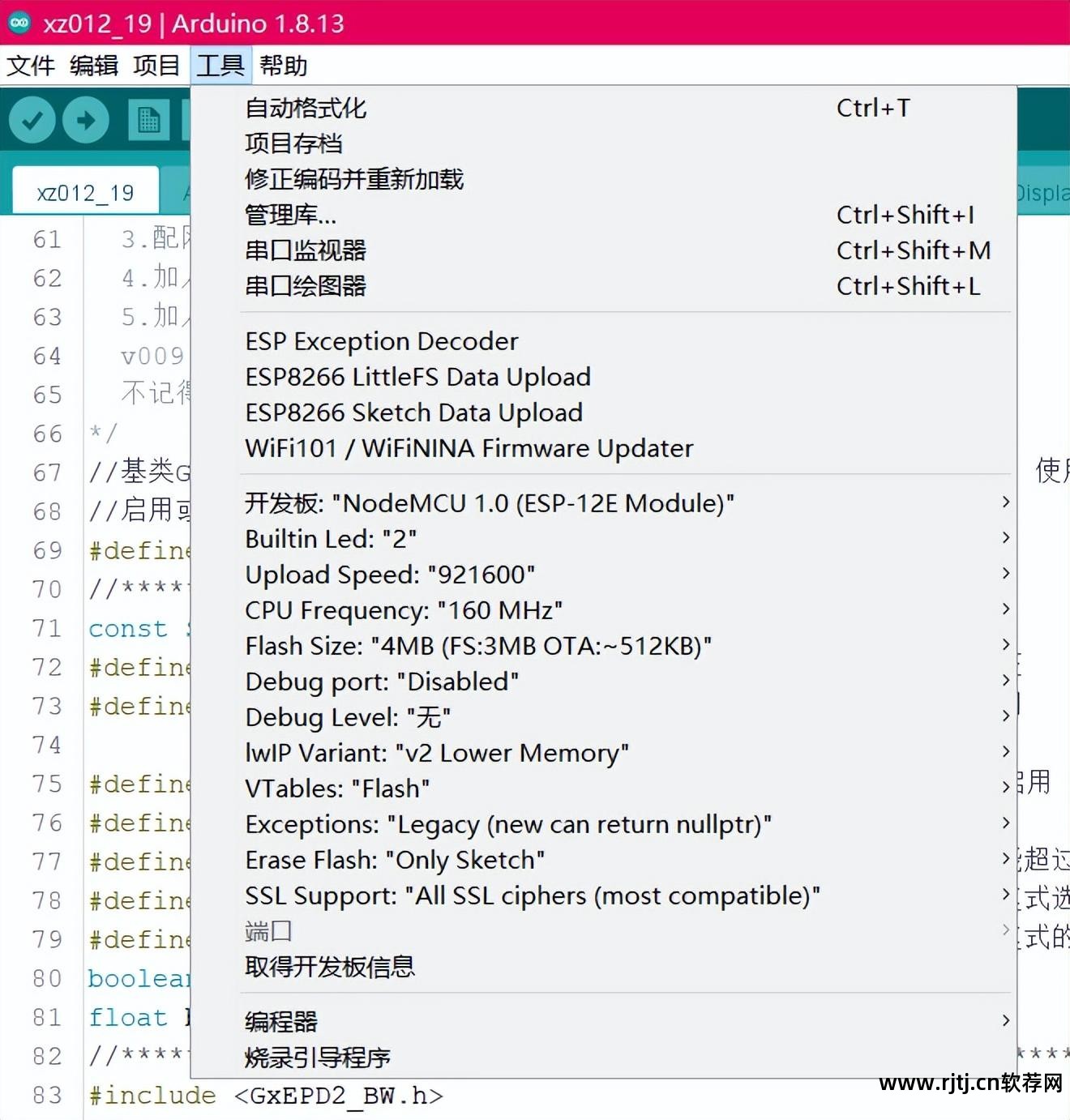
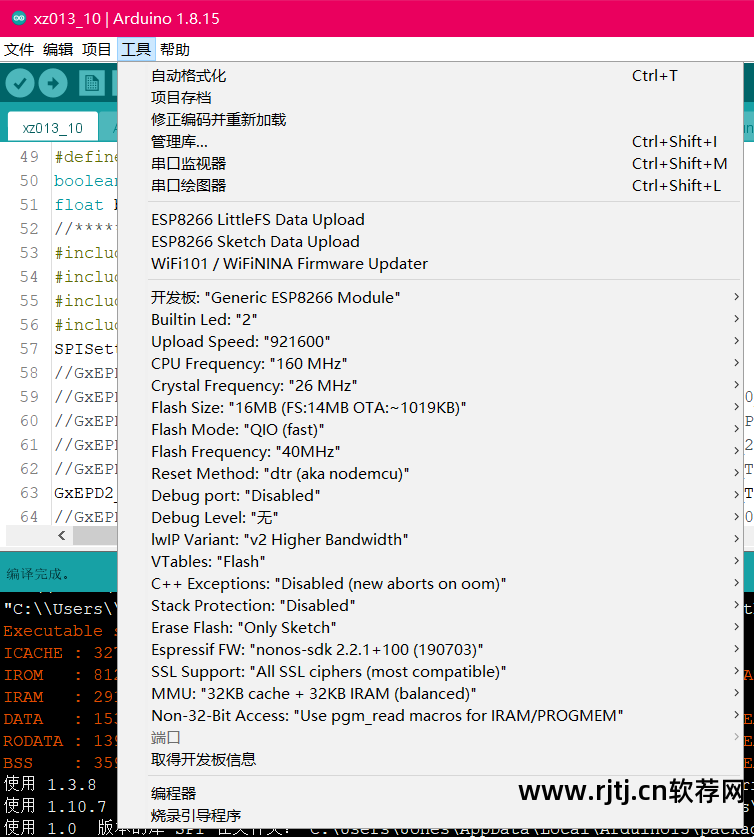
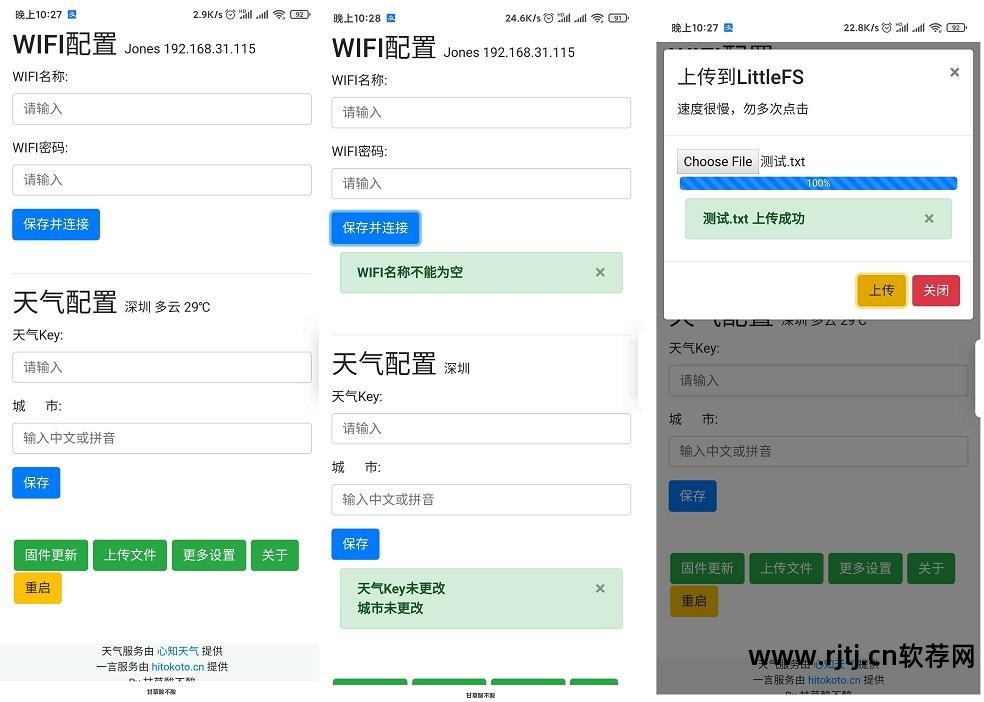
天气水墨屏
吉特:
介绍
功能介绍
如下所示:





小6臂
吉特:
介绍
在机械生产方面,采用铝型材、3D打印、同步带和步进电机,是一种低成本的生产方案。 控制器方面,采用esp32s3芯片,具有WiFi和蓝牙功能。 可输出100KHZ脉冲,支持关节运动和直线运动指令,8路150mA输出,8路6~36V输入,带光耦隔离。 编程方面,采用块式可视化编程,使用手机或平板电脑即可完成编程。
生产流程
1、机械部分
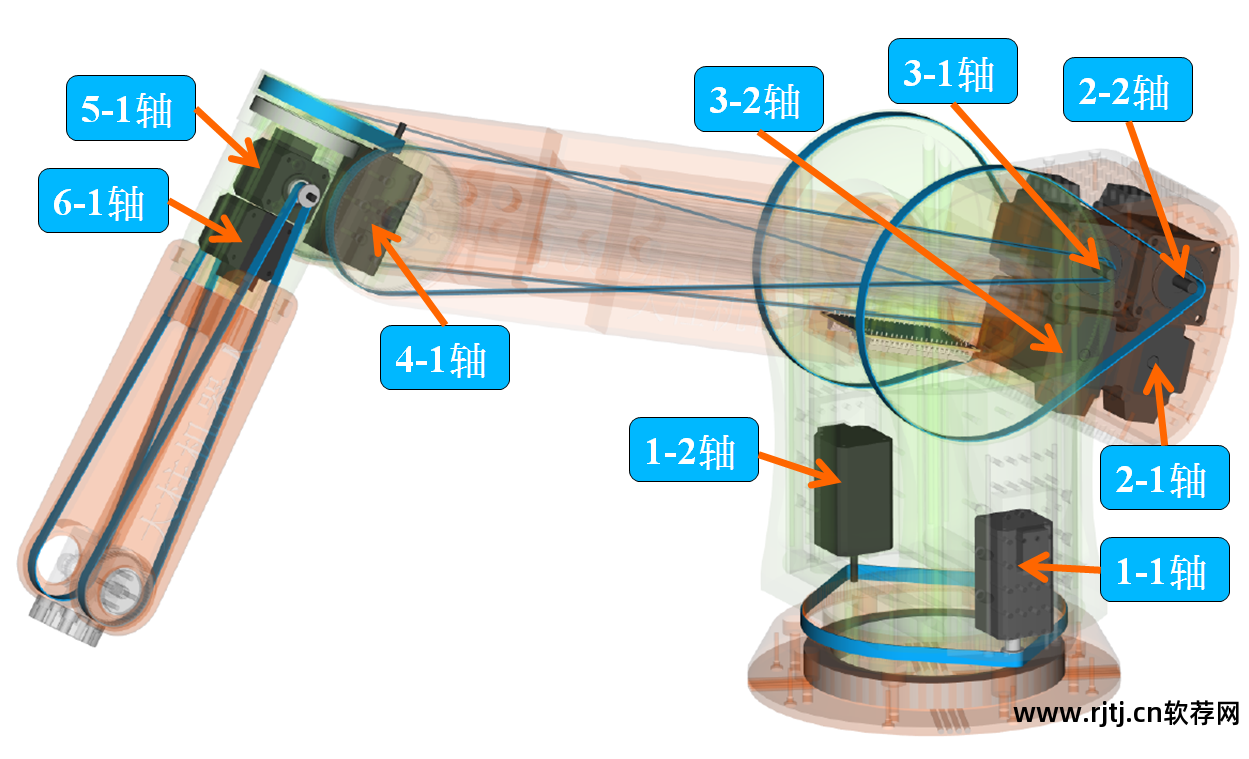
首先使用FreeCAD软件绘制3D模型图。 FreeCAD是一款开源3D设计软件,可以免费使用,方便二次开发,支持运动仿真和简单的有限元仿真。 我用它来设计我的机械臂。 前三个关节采用双电机结构,即一个关节有两个电机。 这种平衡设计不仅提高了负载能力,而且提高了精度和稳定性。 该机械臂现在的负载能力为3公斤,重复定位精度为0.5毫米,臂长为765毫米。
控制器部分
2.1 主控制器
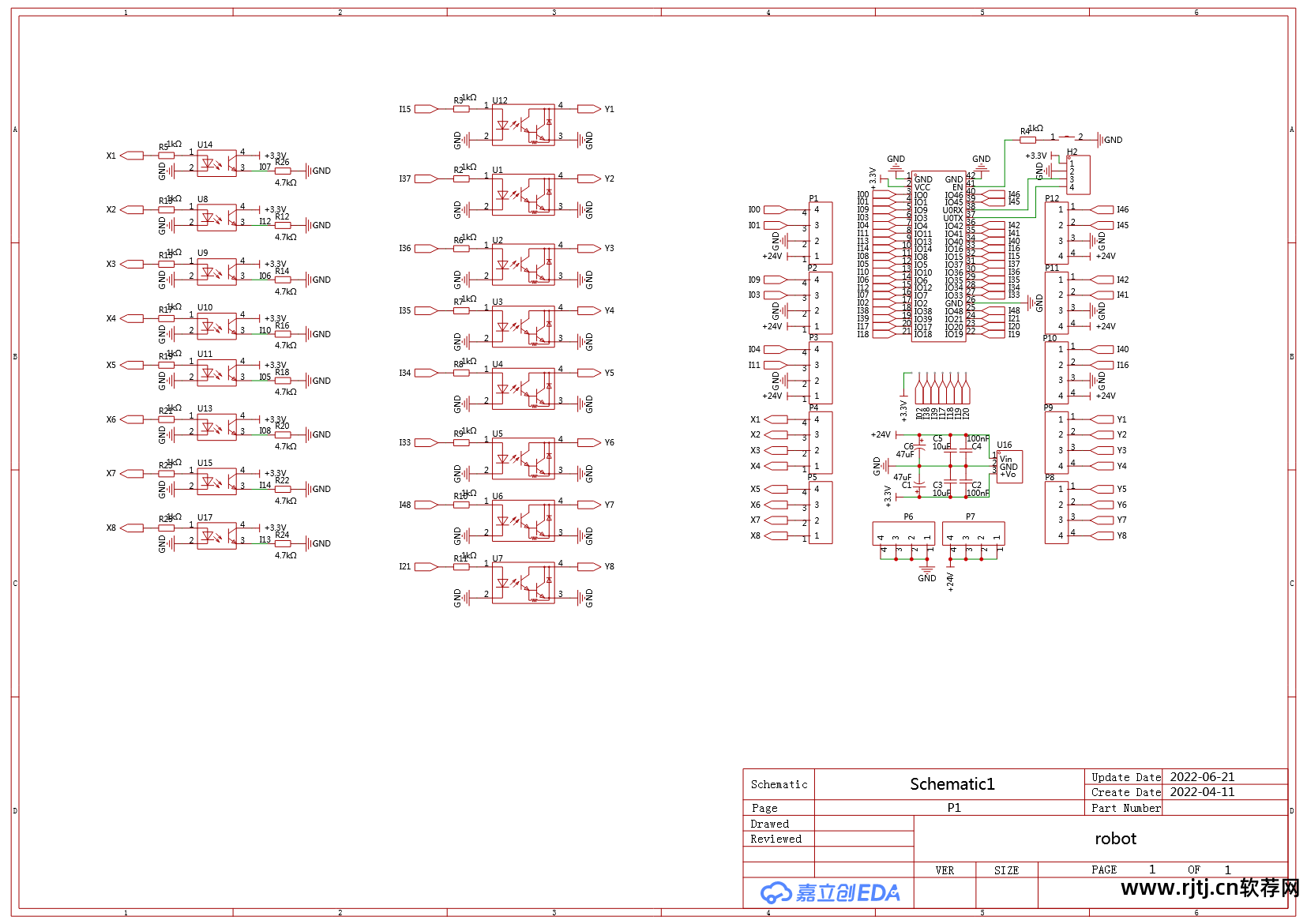
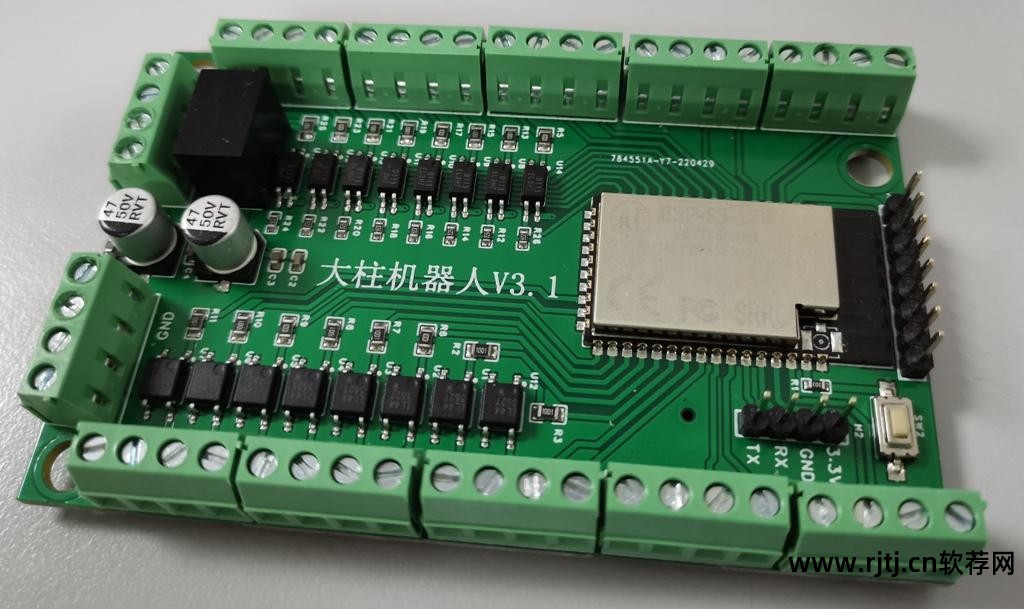
主控制器采用ESP32-S3芯片。 ESP32-S3芯片具有WiFi蓝牙功能,双核,240Mhz频率,45个可编程GPIO。 性能满足机械臂操作算法飞控led软件教程,设计了6个脉冲控制接口来控制6轴机械臂。 8输入8输出,带光电耦合保护电路,方便外接电磁阀。
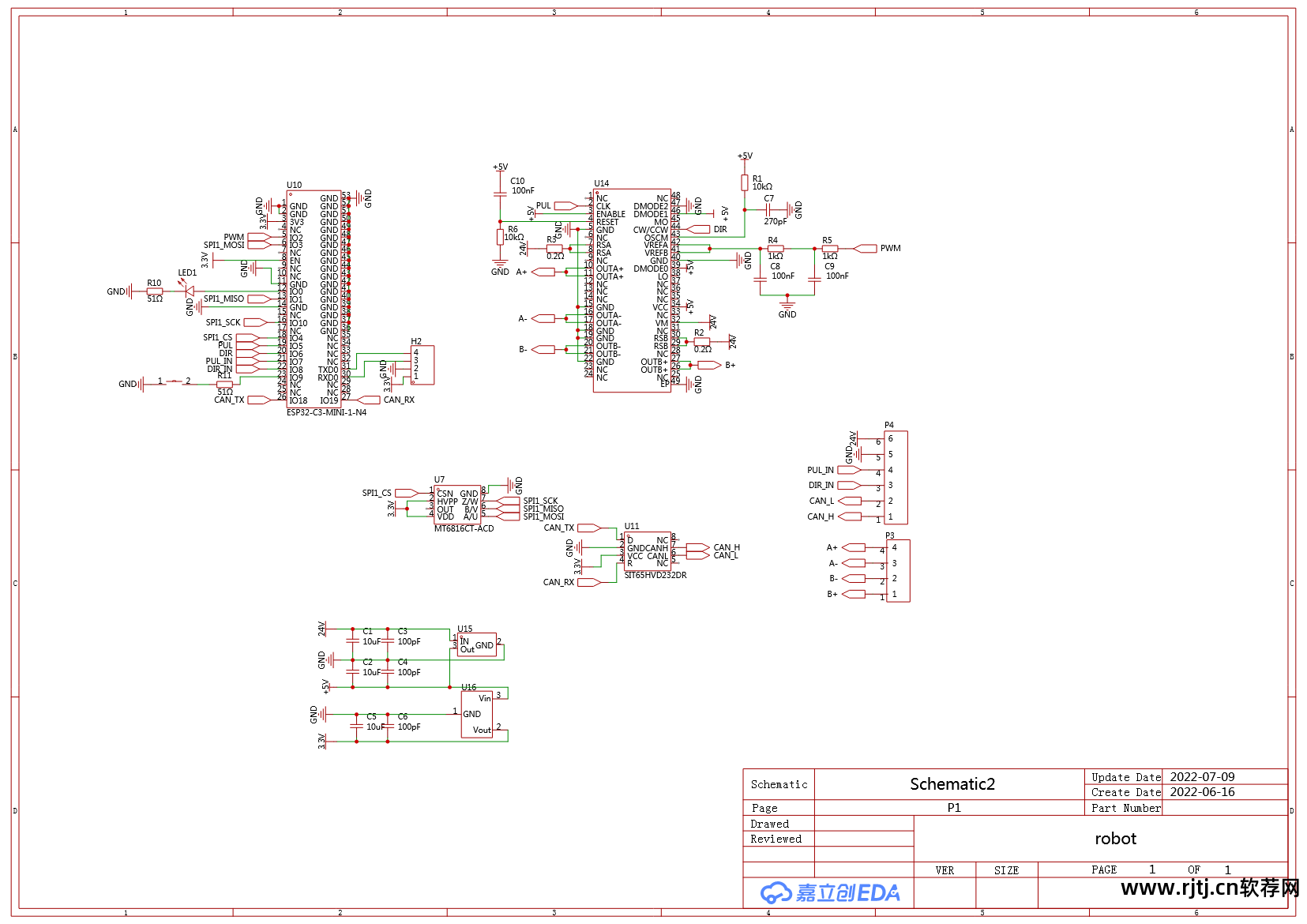
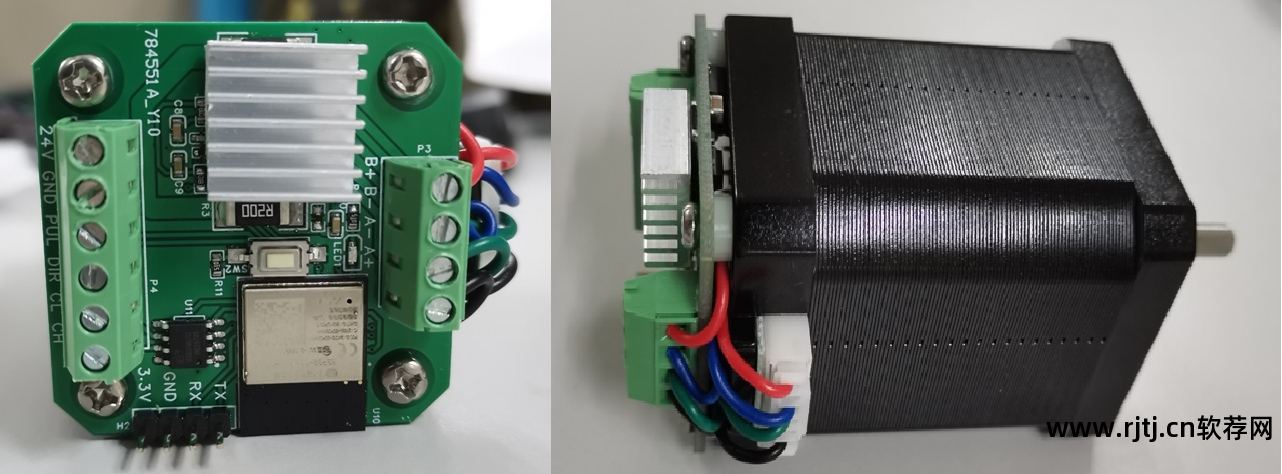
2.2 电机驱动部分
步进电机驱动器采用TB67S109AFTG芯片,支持最大电流4A。 控制芯片采用ESP32-C3,支持脉冲控制和CAN通信控制。 磁性编码器采用MT6816CT-ACD,14位单圈绝对值编码器,最大精度为0.02°。
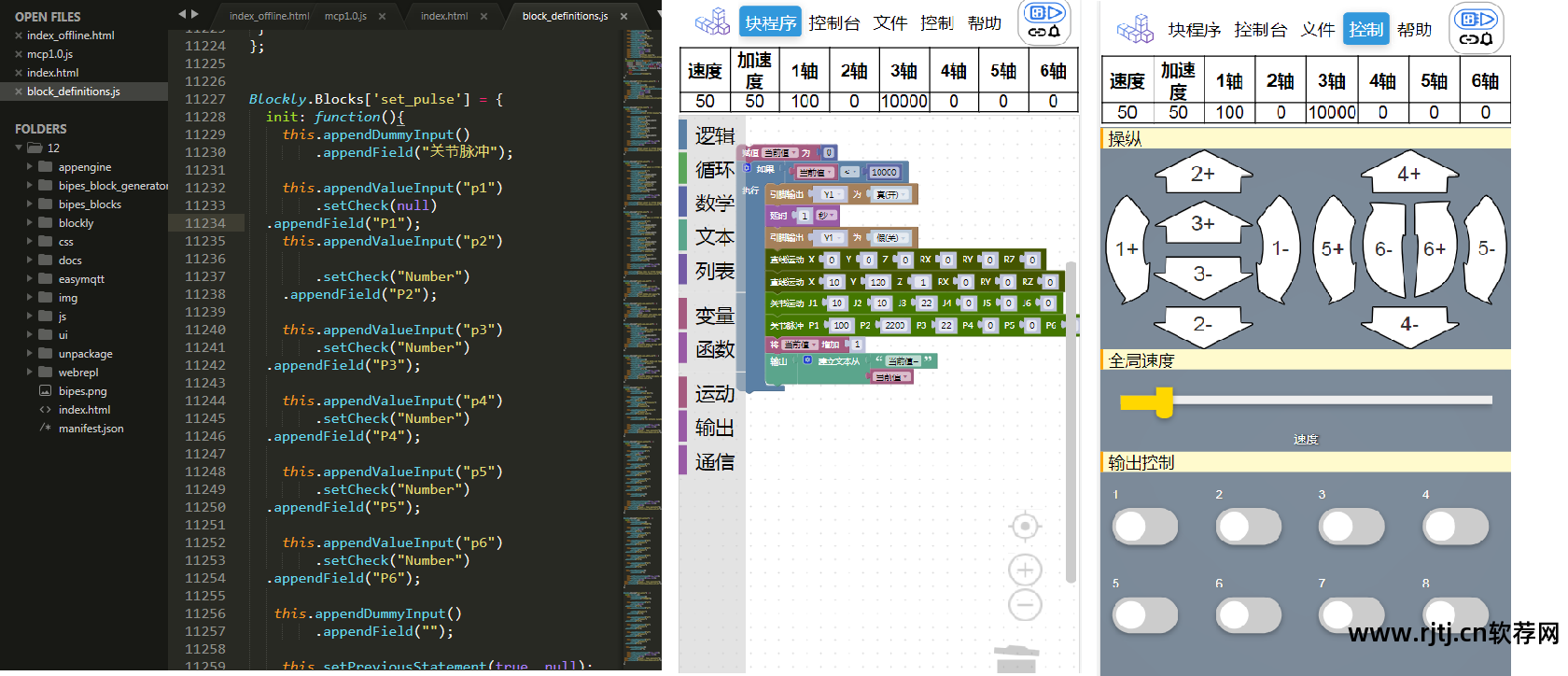
2.3 软件部分
主控板程序基于开源的micropython,可以使用python语言开发单片机程序。 驱动板编程是基于ESP-IDF库编写的C语言程序。 手机控制软件是基于开源的blockly和bipes编写的。
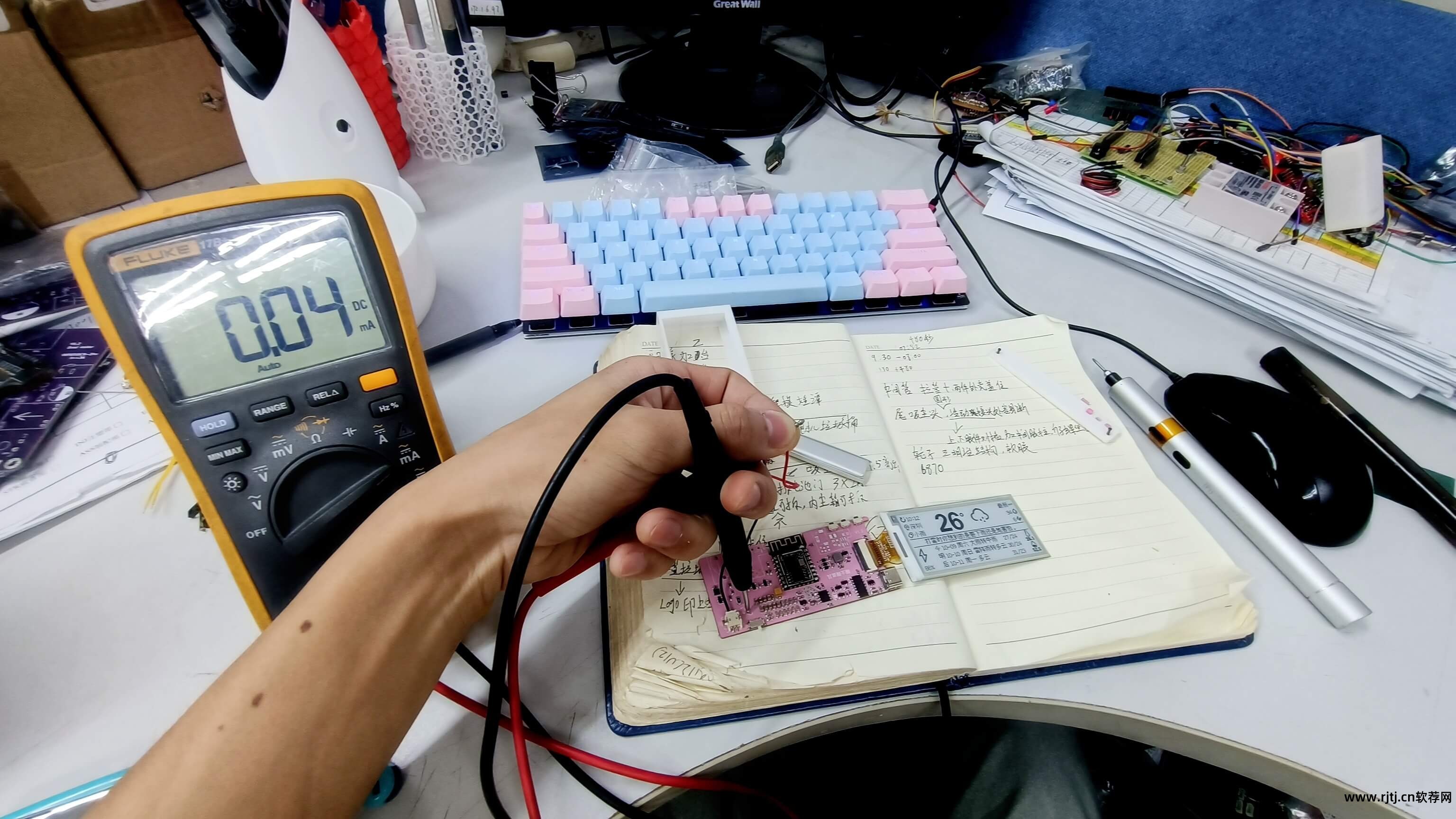
下载软件时,使用USB转串口下载。 下载电机驱动板之前,请按住按钮然后上电进入下载模式。 下载完成后,需要对编码器进行校准。 校准方法为:电机空载通电>>蓝色LED亮起时按住按钮>>进入自动校准模式。

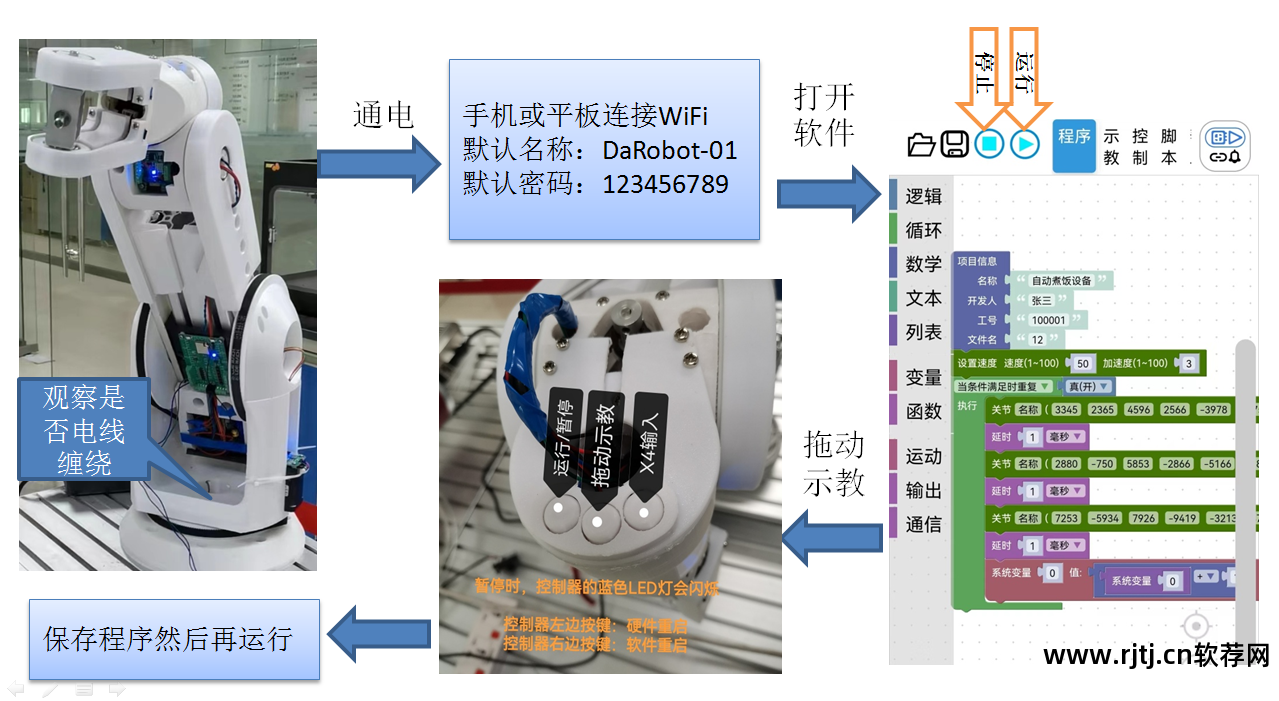
使用说明
注:用手将其拖动到初始位置,然后打开电源,该位置将作为坐标原点。
3.1 手机或平板编程
3.2 计算机编程(Thonny软件)

终于
一台电脑,一个键盘,智慧生活; 几行数字,几个字母,精心书写生活的美好;
一个灵感、一个方案,推动科技进步,推动社会发展。
创作并不容易。 如果您喜欢,请关注、点赞、打赏。 我们会不时更新有用的信息和技术相关信息。 请速速收藏。 谢谢你! 您的一个小举动,是对小编的认可,也是创作的动力。
