三维点云的数据格式有很多种,如pts、ply、pcd、xyz和las等格式。本文基于ply格式介绍几种点云数据可视化的方法和软件,软件通过Meshlab和CloudCompare显示,代码通过Open3D开源库显示。
1.软件显示
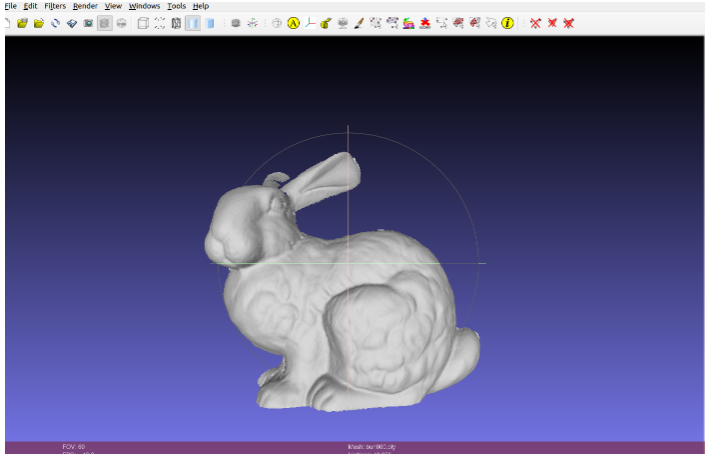
1.1 MeshLab
MeshLab是一个开源的三维模型处理软件,它提供了一系列的功能,包括点云处理、网络重建和模型编辑等。
MeshLab安装
命令行安装:
sudo apt-get update
sudo apt-get install meshlab
# 启动
meshlab
MeshLab显示
直接将ply格式数据拖入MeshLab软件即可。
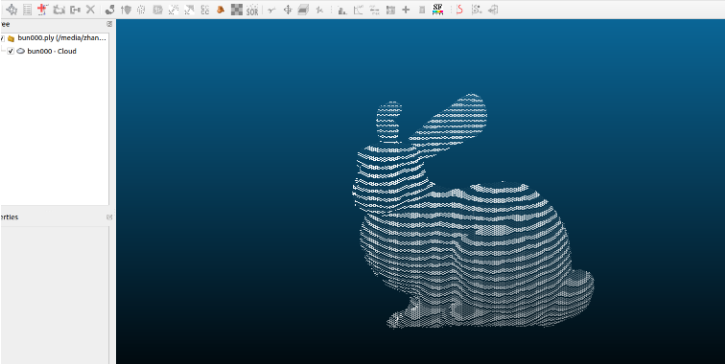
1.2 CloudCompare
CloudCompare是一款3D点云(和三角网格)处理软件。最初设计用于在两个密集3D点云之间或在点云和三角形网格之间执行比较,包括许多高级算法(配准、重采样、颜色/法线/标量场处理、统计计算、传感器管理、交互式或自动分割、显示增强等)。
CloudCompare安装
命令行安装:
sudo apt update
sudo apt install cloudcompare
点击cloudcompare图标即可启动。
CloudCompare显示
直接将ply文件拖到界面即可显示。
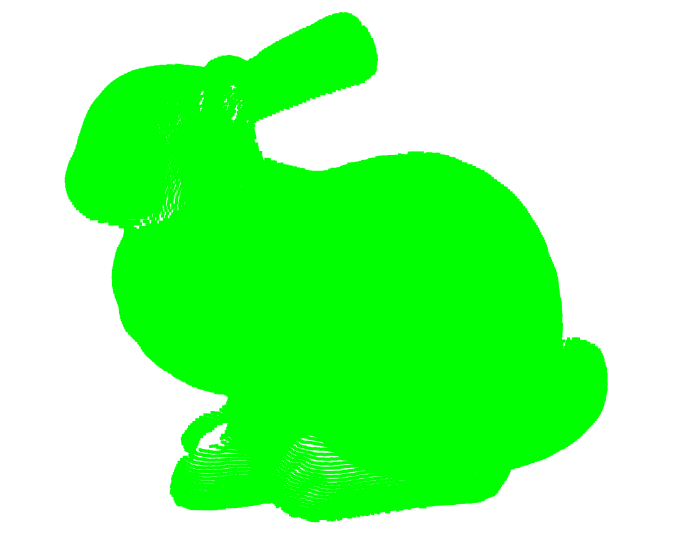
2. Open3D库显示
Open3D和openCV都是intel公司的产品,Open3D是一个开源库,支持快速开发处理3D数据的软件。
显示代码
import open3d as o3d
def ply_imshow(path1):
# 读ply文件
pcd = o3d.io.read_point_cloud(path1)
pcd.paint_uniform_color([0, 1, 0]) # 点云显示绿色
o3d.visualization.draw_geometries([pcd],window_name='pcl file') # 点云显示
效果
欢迎扫码关注:

