介绍
排烟防火闸阀是建筑物内部通风空调系统、机械排烟系统的组成部分。 规范闸阀的生产厂家,衡量球阀的安全性能是非常重要的。 2019年国家市场监督管理总局取消了排烟防火球阀的强制性认证,但企业仍需对球阀产品进行自愿性认证。 国外排烟防火球阀厂家众多,需要送检发证的球阀数量较多。 由于送检的主要产品通过认证后可以涵盖其他小型子类产品,所以公司通常选择高度0.8-2.5m,长度0.8-1.25m的大型球阀作为主要产品进行检验。检查。 目前,球阀送到检验现场后通常堆放在指定区域,需要检验时,检验人员会从大量球阀中找出来。 一个规格为1m×1m的球阀,其质量约为45kg,相当于一个成年人的重量,至少需要两个大力士才能抬起。 如果将被检球阀放置在堆放区内,则需要与其他抗阻球阀连接后方可移入,浪费大量时间和人力。 随着人工技术、计算机技术和人工智能技术的不断发展,过去在地面上存放货物的存储形式已经被取代,立体货架成为存储的一大亮点。 人工仓储的特点是存储量大,存取货物效率高。 本文设计了一种排烟防火球阀智能仓储系统,可以高效的对排烟防火球阀进行仓储和运输,减少球阀在仓储过程中浪费的时间,提高储运效率,节省人力和费用。
一、智能仓储系统工作原理
智能仓储系统是一种人工控制的仓库储运系统。 仓储系统通过智能机械运输工具实现人工入库和拣选,上位机系统实时记录货物在仓库的具体位置和空闲存储空间。 智能仓储系统人工化程度高,产品出入库均由人工运输机械实现,替代了传统方式下工人的机械操作。 上位机管理系统人工登记货物信息,取代冗长的人工盘点,大大提高了仓库的储运效率。 智能仓储系统需要通过AGV(Automated Guided Vehicle)来实现。 AGV是指装有手动导航装置的运输车,可根据导航按指定路线行驶,并具有避障等功能。 以下简称“AGV无人车”。 随着工业手动化的快速发展,AGV无人车已广泛应用于港口、码头、机场、仓储等交通运输行业,在智能仓储系统中发挥着重要作用。
2、智能仓储系统设计
2.1 存储系统结构与组成
智能仓储系统由库房、阀门运输工具和上位机控制软件组成。 仓库主体结构为轻型组合式货架,球阀运输工具为基于激光SLAM导航技术的AGV无人车。 上位机管理软件可以对出入库系统进行管理,规划AGV无人车的路线。
2.2 仓库设计
仓库由两个并排的A、B货架组成,货架之间有5m宽的走廊供AGV无人车取货和转弯。 A货架为3层结构,每层可放置高度和宽度规格范围为1.25m×1.25m的防烟防火球阀; B货架为“H”型单层结构,下层可放置高宽规格范围为1.25m×1.25mm的闸阀,高宽规格范围为2.5m×的闸阀上层可放置1.25m。 仓库结构如图1所示。

图1 仓库结构
设计货架采用圆钢型材点焊而成,为轻型单元结构,每单元承重2000kg。 每个货架单元包含两个存储位,一个存储位对应一个串字托盘。 每个川字托盘可容纳5个长度规格为1.25m以下的闸阀,这样的设计可以满足负载要求。 A货架12个,B货架8个,共可存放200个闸阀。 库房占地面积小,可满足计量闸阀的存放要求。 如果入库球阀数量超出范围,可相应减少上架台数。
2.3 AGV无人车设计
2.3.1 总体结构
AGV无人车车体为三轮平衡重结构。 控制系统由显卡、激光雷达、深度单反、IMU、通讯模块、里程表、电机驱动模块和液压升降模块组成。 显卡为Jasonna-no,操作系统为Ubuntu 18.04,可通过并口通信驱动STM32底层板,控制电机模块和油压升降模块; 激光雷达为RPLIDARA2,测量距离为0.2-12m,精度为探测值的2倍。 %,帧率为检测值的1%; 深度单反采用AstraPro,视场角(FOV:H58.4°×V40.2°),视距0.6-8m; IMU惯性检测单元为HWT905九轴陀螺仪Sense,可输出加速度、角度等数据。 控制系统结构如图2所示。
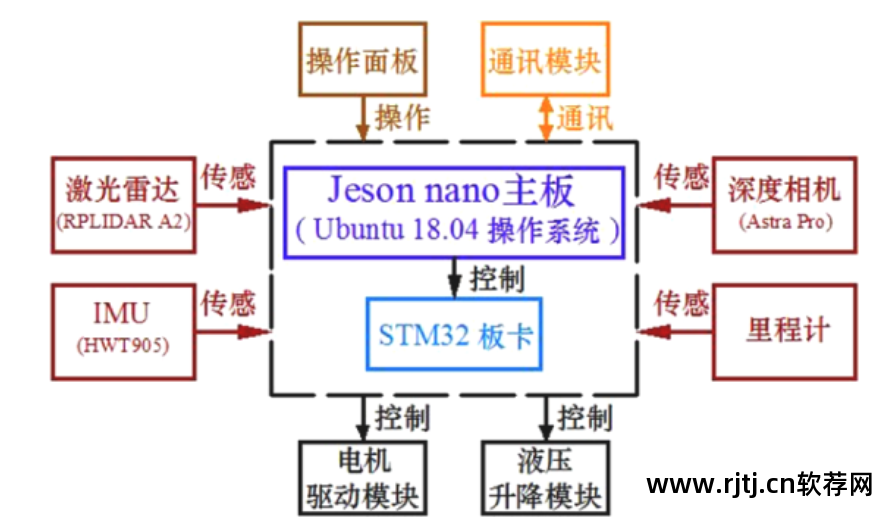
图 2 控制系统结构
2.3.2 激光SLAM导航系统
目前AGV无人车导航技术有磁条导航、色带导航、二维码导航、激光导航、SLAM导航等,磁条导航需要在地面铺设轨道,影响区域通行性能; 色带导航易受污染,影响导航精度。 激光导航需要反射镜,价格昂贵。 该系统采用激光SLAM导航技术,不铺设轨道,不使用反光板,以仓库内的墙壁、货架立柱为参照,实现定位导航。
SLAM(Simultaneous Localization and Mapping)是一种同步定位和地图构建技术。 AGV无人车放置在仓库任意位置,开始移动。 激光信号通过激光雷达发送至参照物,并与参照物反射的杂波信号进行比较。 然后获取AGV无人车的位置、速度等信息。 同时可与深度单反、IMU、里程计获取的数据进行融合,实现仓库建图、AGV无人车定位、避障、存储、自主导航等功能。
2.3.3 导航算法
SLAM导航算法分为两大类:一类是基于混合理论的SLAM算法,如AMCL、EKF、Gmapping等; 另一种是基于图优化理论的SLAM算法,如Karto、Hector、Catograph-pher等。
基于图优化理论的SLAM算法具有闭环测量环节,用于优化的存储空间小,适合建立大规模场景。 但该算法计算量大,用普通设备无法进行复杂的估计。 基于粒子检测理论的SLAM算法计算量小,适用于构建曲面区域的场景。 存储空间在检测现场占地面积小。 本文结合实际场景,选择了基于粒子检测理论的Gmapping算法。 Gmapping算法可以实时建立场景地图,应用广泛。
定位及照明原理:将AGV无人车放置在仓储场景中的某个位置,将无人车、激光雷达和里程表的坐标系设置为初始状态并进行坐标转换,使无人车可以从原点O0行进到On位置,然后O1,O2,...,On-1依次为经过点。 无人车在行驶过程中,激光雷达发射激光束扫描周围环境。 激光束到达的区域可以标记为0,激光束难以到达的区域,即障碍物标记为1。存储环境可以通过包含0、1信息来表示通过网格地图。 里程表记录无人驾驶车辆的姿态。 无人车在O0-On的任意一点都有自己的位姿和栅格地图数据。 无人车在O1时,根据自身位姿预测行驶轨迹; 到达O2时,通过里程计数据更新无人车位姿和地图; 开车到 On,估计所有路过点的权重并建立存储区域的精确地图。
2.3.4 路径规划
如果无人车将球阀运送到指定地点,需要规划其行驶路径。 AGV无人车行驶路径规划主要分为两部分:仓储路径规划和拣选路径规划。
检验球阀运到检验现场后,需要进行卸货、录入信息等操作。 入库是将球阀从信息录入区运输到库位,AGV无人车完成一次入库后返回信息录入区。 存储路径规划如图3所示。
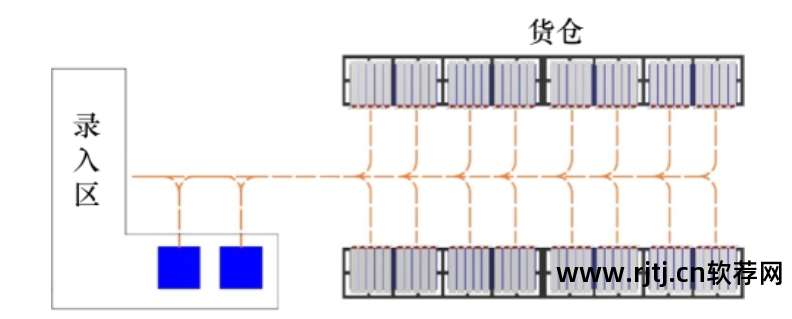
图3 存储路径规划
拣货是指将球阀从仓库相应的存放位置送到检验区。 一个川字托盘上放着5个球阀。 取出待检球阀后,需要将托盘放回原存放位置。 拣选路径规划如图4所示。

图4 拣选路径规划
由于一次只从托盘上取下一个球阀进行检查,从测量区返回的托盘仍有剩余存放空间。 如果有需要入库的球阀,可以设置路径让AGV无人车先将托盘传送到信息录入区,待球阀装满托盘后再运回原仓库. 图5为AGV无人车。 球阀在库位拣货补库的路径图。

图5 指定路径
2.4 上位机软件设计
上位机通过智能仓管软件对系统进行管理,具有仓位状态显示、阀门信息查询、AGV无人车导航路径设置等功能。 仓库中的每个存储位置都有一个对应的代码。 例如,货架A中层第一个库位的库位编号为Am-1物流仿真软件,货架B下层第八个库位的库位编号为Bu-8。 在软件的位置显示屏上可以实时显示每个位置的状态,如图6所示。其中,绿色表示存储位置已满,红色表示存储位置空闲,橙色表示存储位置的球阀未满。
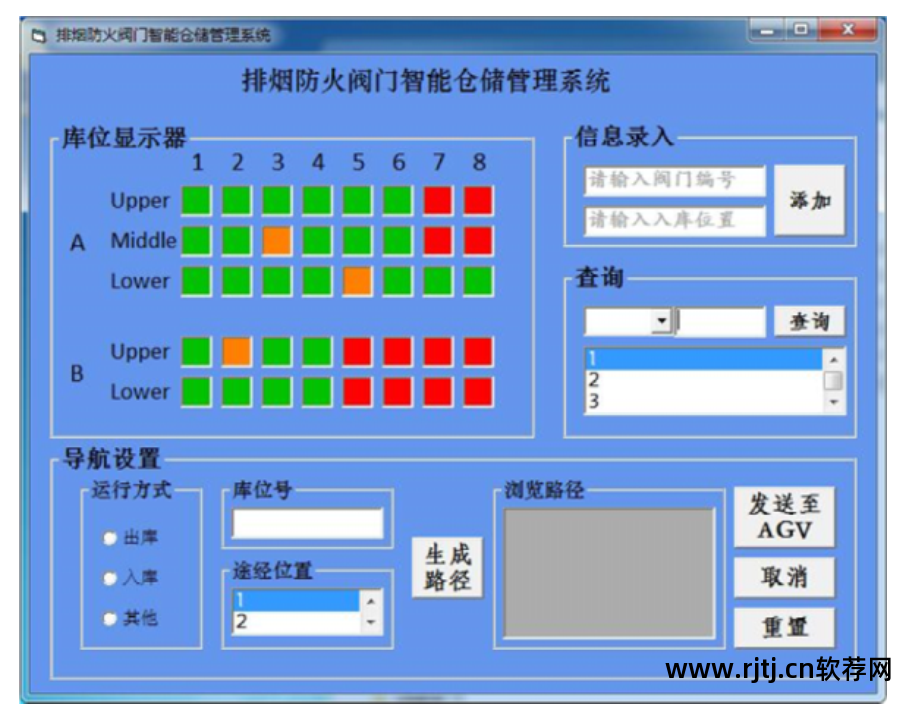
图6 智能仓储管理系统界面
球阀送达验货现场后,业务员登记球阀信息,生成二维码(QRCode)标签,包括球阀编号、生产厂家、规格型号等信息。 标签贴在外壳上,是球阀的唯一标志。 用手持读写终端扫描标签上的二维码,即可将球阀编号录入仓库管理系统,分配库位。
在查询区,您可以通过输入球阀编号搜索库位,也可以通过输入库位编号输入该库位中的所有球阀。 在导航区域内设置AGV无人车的运行方式、位置编号、经过点等信息,系统将生成导航路径发送给AGV无人车执行导航指令。
3. 系统仿真与分析
在Inventor中对智能仓储系统进行建模,系统总体布局如图7所示。

图7 智能仓储系统总体布局
设置AGV无人车行驶速度为0.5-3km/h,空载直线行驶时速度可保持在3km/h。 转动速度应减弱,以保持球阀在托盘上的稳定性,防止球阀因惯性而掉落。 货叉提升速度为10-15m/min。 空载时升降速度可适当提前,载重时适当放慢速度。 随机选取10个库位进行出入库仓库仿真分析,仿真结果如表1所示。表中T1为AGV无人车行驶时间,T2为提叉装车作业时间卸托盘,T0为完成一次配送任务的总时间。 从表中可以看出,使用该智能存储系统查询和调运计量球阀需要0.60-1.43分钟,人工查找和调运大约需要10-15分钟。与人工操作相比,工作效率智能存储系统的改进
85.7%-94.0%。
表 110 位置模拟数据表

4。结论
本文将人工仓储技术应用于排烟防火球阀的储运中物流仿真软件,设计了排烟防火球阀智能仓储系统。 系统采用并排货架结构,利用激光SLAM技术对AGV无人车进行定位导航,在上位机管理软件中设置AGV无人车进出库路径。 设置并模拟了10组球阀进出路线。 仿真结果表明,该智能仓储系统的工作效率较人工操作提高了85.7%-94.0%。 设计的排烟防火球阀智能仓储系统,具有球阀手动进出、库位状态实时显示等功能。 该系统准确高效,具有一定的应用价值。
----好文章,值得分享----
